Lidwave פיתחה LiDAR בטכנולוגיית אור קוהרנטי חדשה לגמרי
2 ינואר, 2024
מבוססת על התכונות של אור קוהרנטי, ומאפשרת לממש חיישני 4D באמצעות חומרה אמינה ופשוטה יותר מחיישני ToF ו-FMCW הקיימים בשוק. אבטיפוס ראשון יוצג בשבוע הבא בתערוכת CES 2024 בלאס וגאס

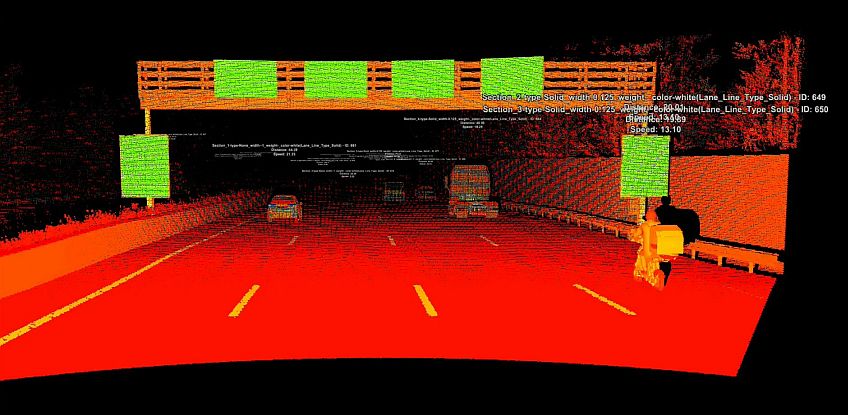
בתמונה למעלה: המחשה של החיישן של לידווייב. צילום: Lidwave
חברת Lidwave מהר חוצבים שבירושלים פיתחה טכנולוגיית LiDAR מסוג חדש לגמרי המבוסס על הקוהרנטיות של האור. הוא מייצר תמונה ארבע מימדית (4D) של הסביבה, שבה ניתן לראות את האובייקטים, את המרחק מהמצלמה של כל אובייקט בתמונה ואת הכיוון ומהירות תנועתו ביחס למצלמה (בדומה למכ"ם). אבטיפוס ראשון של החיישן החדש יוצג בתערוכת CES 2024 שתיפתח בשבוע הבא בלאס וגאס, ארה"ב. ה-LiDAR של לידווייב מגיע לטווח של יותר מ-250 מטר ומספק רזולוציה זוויתית של 0.01⁰. הוא מצריך רוחב פס הנמוך פי 30 בהשוואה לחיישנים מתחרים ועושה שימוש באלומת לייזר חלשה יותר.
מנהל הפיתוח העסקי של לידווייב, ניצן אביבי, סיפר ל-Techtime שהחברה נמצאת במגעים עם ספקיות מרכזיות של תעשיית הרכב (חברות טיר-1) אשר מבצעות איתה ניסויים משותפים בשימוש ב-LiDAR החדש. הטכנולוגיה של החברה מבוססת על מדידת שינויים באור קוהרנטי ולכן קיבלה את השם Finite Coherent Ranging – FCR. אור קוהרנטי הוא אור שבו כל הפוטונים הם בעלי פאזה זהה ומתנודדים בתדר אחיד. בניגוד לטכנולוגיות המתחרות, כמו Time of Flight – ToF ו-Frequency Modulation Continuous Wave – FMCW המתבססות על הפרדה בין המשדר והמקלט, בטכנולוגיית FCR של לידווייב שתי הפעולות מתבצעות ביחד על-גבי חיישן אחד ובאמצעות עדשה אחת.
לדברי אביבי, הטכנולוגיה מתגברת על החסרונות המובנים של טכנולוגיות ToF ו-FMCW הקיימות. חיישני ToF (כמו של אינוויז ולומינר) מבוססים על שידור פולסים של קרן לייזר, ובונים את תמונת העולם באמצעות חישוב זמני ההחזר של הפוטונים, הפוגעים באובייקטים בסביבה, וחוזרים אל הגלאי בחיישן. לאחר העיבוד הראשוני, החיישן מייצר "ענן נקודות" שממנו המעבד בונה תמונה חזותית של הסביבה. חיישני FMCW (כמו של חברת Aeva) מבצעים שידור רציף של אותות בעלי תדר משתנה (Chirp signal), כאשר המרחק של האובייקטים מחושב בהתאם להפרשי העוצמה (אמפליטודה) והמופע (פאזה) שבין האותות המשודרים לבין האותות המוחזרים. בזכות אפקט דופלר, הם גם מחשבים את מהירות האובייקט, ולכן קרויים 4D LiDARׂ.

החסרונות המובנים של טכנולוגיות ToF ו-FMCW הקיימות
לחיישני ToF יש חסרונות רבים: כדי לייצר תמונה בעלת רזולוציה ודיוק גבוהים, יש לבצע דגימה של הסביבה בקצב מאוד גבוה מאוד (זמן חשיפה של פחות ממיליארדית השנייה), אשר מייצר "רעש" שכדי להתגבר עליו יש צורך באלגוריתמיקה מורכבת ובעוצמת עיבוד גבוהה. הם רגישים להפרעות סביבתיות כמו אור שמש, ומצריכים שימוש בקרן לייזר חזקה, בעלת עוצמה הקרובה לסף שנקבע כמסוכן לעין. אימוץ נרחב של חיישני ToF בתעשיית הרכב מייצר אתגר נוסף: כל חיישן צריך להתעלם מאותות לייזר המגיעים מהחיישנים של כלי רכב סמוכים, ויש צורך לקודד ולפענח כל אות.
חיסרון נוסף: חיישן ToF אינו מודד ישירות את מהירות האובייקט, אלא מבצע השוואה בין שתי מדידות שונות, וגם זה מצריך משאבי אלגוריתמיקה ועיבוד, ומייצר שגיאות מדידה ועיכובים בזיהוי המהירות. בשנים האחרונות מתפתחת טכנולוגיית FMCW המתבססת על התכונות הגליות של האור, אולם היא נתקלת בקשיים רבים: מדידת הפרשי פאזה בין הגל היוצא והגל החוזר היא משימה פיסיקלית מורכבת שכדי להפיק ממנה תמונה ברזולוציה ובדיוק גבוהים יש צורך במעגלי אלקטרוניקה יקרים יחסית. לכן רוב החברות המפתחות פתרונות מבוססי FMCW מתמדדות עם קשיים גדולים וחלקן לא עומד בלוח הזמנים המקורי.
לידוויב לא העניקה פרטים מלאים על הטכנולוגיה, אולם דיווחה שה-LiDAR שלה אינו דורש מדידת פאזה, אלא רק מדידת אמפליטודה באמצעות מניפולציות על התכונות הקוהרנטיות של האור. הטכנולוגיה הזאת משפרת את יחס האות לרעש (SNR), ומאפשרת לממש את החיישן בארכיטקטורת חומרה אלקטרונית פשוטה וזולה יותר. בניגוד למבנה הבי-סטטי המקובל של החיישנים (משדר נפרד ומקלט נפרד) טכנולוגיית FCR היא מונו-סטטית: השידור והקליטה מתבצעים דרך נקודה אחת (ועדשה אחת). המבנה הזה מפחית את דרישות הדיוק בקו הייצור ואת הצורך בביצוע כיול בין היחידה המשדרת ליחידה הקולטת. הוא גם מבטל את הסיכון שהמערכת תצא מכיול בשל התפשטות והתכווצות אלמנטים במערכת עקב שינויי טמפרטורה.
הסוד המקצועי: מנוע סיליקון פוטוניקס בשבב יחיד
מערכות מבוססות קוהרנטיות מאפשרות שימוש בעוצמת שידור נמוכה יותר ממערכות ToF, ובזכות זאת הצליחה לידוויב לייצר רכיב סיליקון פוטוניקס ייעודי (Optical Engine Silicon Photonics המיושם בשבב בודד, אשר מפשט את תהליך הייצור ומפחית עלויות. ניצן אביבי: "טכנולוגיית FCR מצליחה לעקוף כמה מהקשיים המשמעותיים ביותר בפיתוח חיישני ליידאר 4D, וההוכחה היא המהירות בה הצלחנו להציג אב–טיפוס שעובד בתנאי אמת ולא רק במעבדה. הליידאר שלנו לא דורש קו ייצור מורכב, והדבר יקל בהמשך על ייצור החיישנים במהירות ויפחית את העלויות".
חברת Lidwave הוקמה בשנת 2021 על-ידי שלושה פיזיקאים מהאוניברסיטה העברית: המנכ"ל יהודה וידאל, המדען הראשי אורי ווייס ומנהל הטכנולוגיות הראשי ד"ר יוסי קבסה. החברה נתמכת על-ידי קרנות הון סיכון, בהן: Jumpspeed Ventures ו-Sapir Venture Partners המתמקדת בחברות דיפ-טק ישראליות. במסגרת ההדגמה ב-CES 2024, היא תציג גם את השילוב של החיישן במערכת הסימולציה הסינתטית של חברת Cognata, אשר מייצרת תרחישים מלאכותיים דמויי מציאות לבדיקת התנהגות מערכות הרכב. בהמשך השנה, היא מתכננת להציג גרסה בשלה יותר של החיישן (Sample B), המספק מיפרט משופר מבחינת שדה הראייה ומספר הדגימות לשנייה (pps). הוא מותאם לשווקים נוספים מעבר לשוק הרכב, דוגמת רובוטיקה והעיר החכמה.
פורסם בקטגוריות: Automotive , אלקטרואופטיקה , חדשות , ראיית מכונה , תעשייה ישראלית
פורסם בתגיות: LiDAR , Lidwave , אלקטרואופטיקה , לידווייב , סיליקון פוטוניקס


