חברת אינטל וקבוצת חוקרים מאוניברסיטת NUS בסינגפור פיתחו יכולת מישוש עדינה לרובוטים, המבוססת על שימוש בעור מלאכותי (e-skin) מסוג חדש ועל המעבד הנוירומורפי Loihi של אינטל. במסגרת הניסוי, הם השתמשו ביד רובוטית המצויידת בעור מלאכותי על-מנת לקרוא כתב ברייל ולאחר מכן להעביר דרך הענן את נתוני החישה לשבב Loihi, שעיבד את המידע והפיק ממנו משמעות סמנטית. Loihi השיג דיוק של יותר מ-92% בזיהוי אותיות כתב ברייל, ונדרש להספק קטן פי 20 מזה שנדרש למעבד סטנדרטי (Von Neumann) כדי לבצע את אותה המשימה.
במקביל, נבחנה טכניקה לשיפור יכולת התפיסה הרובוטית באמצעות שילוב של נתונים מהעור המלאכותי וממצלמה מבוססת אירועים (בתמונה למטה). עיבוד המידע איפשר לרובוט לזהות תופעות כמו החלקה סיבובית, החשובה לאחיזה יציבה, וסיווג קטגוריות שונות מיכלים אטומים מסוגים שונים, שהכילו כמויות שונות של נוזלים (היו בעלי משקל שונה). התוצאה: שילוב של ראייה מבוססת-אירועים ומגע באמצעות רשת עצבית מגיעים לדיוק גדול יותר ב-10% בסיווג אובייקטים בהשוואה למערכת ראייה בלבד. מעבד Loihi עיבד את המידע במהירות גבוהה ב-21% מאשר שבבי עיבוד גרפי, ובהספק נמוך פי 45.

חיישני העור המלאכותי מחקים את מערכת העצבים הביולוגית
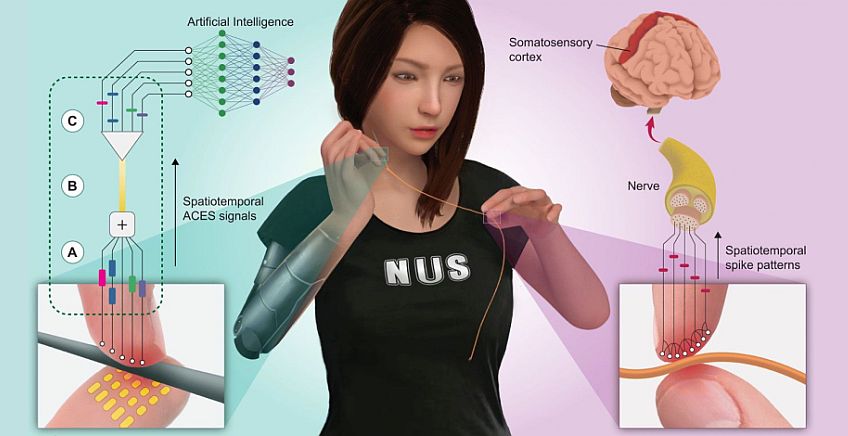
ליבת הניסוי היא עור מלאכותי שפותח בפקולטה להנדסה באוניברסיטה הלאומית של סינגפור (NUS). הוא מבוסס על פיתוח ארכיטקטורת עיבוד ותקשורת חדשה, המחקה את מבנה מערכת העצבים הביולוגית, בדומה לאופן שבו רשתות בינה מלאכותית נוירוניות מחקות את מבנה הנוירונים במוח. הארכיטקטורה החדשה, ACES – Asynchronously Coded Electronic Skin, מאפשרת לשלב מערכים של עד 10,000 חיישני מגע ביריעת פלסטיק גמישה, ולשדר את המידע אל מערכת עיבוד מרכזית במהירות גדולה יותר מזו של מערכת העצבים האנושית.
הרעיון של עור מלאכותי הכולל חיישני מגע אינו חדש, אולם יישומו נתקל בקשיים רבים. כדי לקבל חישה אפקטיבית יש צורך בחיישנים רבים מאוד, ביכולת עמידה בחבלות ותקלות בחיישנים בודדים מבלי שהדבר ישבש את כל המערך, במהירות תגובה גדולה ובהספק נמוך מאוד. התפישה המקובלת היא פריסת מטריצה של חיישני מגע (pressure sensors) המתחברת אל מעבד באמצעות פרוטוקול חלוקת זמן (Time-Divisional Multiple Access).
 מחוברים אל הגלאי (כתום) במוליך יחיד")
ה-TDMA נועד לצמצם את מספר המוליכים בעור המלאכותי, שכן הוא מעניק חלון שידור נפרד לכל חיישן. אלא שבגישה הזאת, ככל שגדל מספר החיישנים, יורד זמן התגובה הכולל של המערכת. כדי להתגבר על הבעיה יש צורך במהירות דגימה גדולה יותר, אולם הדבר דורש שימוש במעגלי דגימה מהירים ומעגלי דחיסת מידע חכמים. אולם הפתרון הזה מוגבל מאוד: העלות גבוהה, המעגלים דורשים הספק גבוה, ודגימה ודחיסה חכמים תלויים בידע מוקדם על סוג המגע הצפוי. בשורה התחתונה, גם הפתרון הזה מוגבל מבחינת מספר החיישנים שניתן לשלב בעור המלאכותי.
תפישת ACES שפותחה ב-NUS מבוססת על חיקוי מערכת העצבים: החיישנים מקושרים באמצעות מוליך אל ערוץ מרכזי המעביר את המידע המקובץ אל יחידת העיבוד – מעין מוח המיושם באמצעות רשת לימוד עומק נוירונית (Deep Learning Neural Network). ליבת המערכת היא ארכיטקטורת תקשורת א-סינכרונית המאפשרת תמיכה באלפי חיישנים בו-זמנית.
כל חיישן משדר פולס מידע רק כאשר רמת הגרוי שלו חוצה סף מוגדר מראש (threshold). הפולס מפוזר על-פני טווח תדרים רחב מאוד באמצעות טכניקת spread spectrum. הדבר מאפשר לשדר מיידית את כל האותות ולספק להם עמידות ברעשים גם בהספקים נמוכים מאוד. אותות החיווי של כל חיישן משוחזרים במעבד הנוירוני בהתאם לחתימת התדר שלו ולמיקומו הידוע מראש.
מוח אלקטרוני בתוך שבב

המוח המרכז את כל המידע הוא מחשב המבוסס על המעבד הנוירומורפי של אינטל. מעבד נוירומופרי הוא יישום ברמת החומרה של המבנה של רשתות נוירוניות, אשר מיושמות בדרך-כלל ברמת התוכנה בלבד. כל מעבד מיוצר בתהליך של 14 ננומטר ומכיל 128 ליבות המיישמות 130,000 נוירונים. להערכת אינטל, במשימות ספציפיות, מסוגל המעבד Loihi לעבד מידע במהירות גדולה פי 1,000 וביעילות גדולה פי 10,000 מאשר מעבד סטנדרטי (CPU).
בחודש יולי 2019 הכריזה אינטל על מערכת עיבוד נוירומורפית הכוללת 8 מיליון נוירונים אשר ממומשים באמצעות 64 מעבדי Loihi. החברה מסרה שמדובר בשלב הראשון של תוכנית פיתוח שאפתנית, המיועדת להרחיב את הארכיטקטורה להיקף של כ-100 מיליון נוירונים. על-פי ההערכה המקובלת כיום, במוח האנושי יש כ-84 מיליארד נוירונים. כאשר אינטל מדברת על 100 מיליון נוירונים במערכת אחת, ואולי מיליארד נוירונים בתוך מספר שנים – מדובר במוח אלקטרוני זעיר המשתווה לזה של בעלי חיים רבים…