
מהפיכה אופטית במפעלי אלקטרוניקה: מערכות בדיקה אוטומטיות תלת-מימדיות
19 מאי, 2013
מערכות הבדיקה האופטיות התלת-מימדיות (3D-AOI) מתחילות להחליף את המערכות הדו-מימדיות בקווי ההרכבה והייצור של מעגלים אלקטרוניים. מה הם ההבדלים ביניהן? מדוע התעשייה נכנסת לטכנולוגיה החדשה והמהפכנית?

מערכות הבדיקה האופטיות התלת-מימדיות (3D-AOI) מתחילות להחליף את המערכות הדו-מימדיות בקווי ההרכבה והייצור של מעגלים אלקטרוניים. מה הם ההבדלים ביניהן? מדוע התעשייה נכנסת לטכנולוגיה החדשה והמהפכנית?
מאת: משה לוי, חברת ממטק נציגת SAKI בישראל
מערכות בדיקות אופטיות אוטומטיות (Automatic Optical Inspection) מאבחנות תקלות ובעיות באיזור המטרה באמצעות הדמאה אופטית וניתוח תמונה. מערכות ה-AOI הראשונות נועדו לבדיקת מעגלים מודפסים ללא רכיבים. שתי חברות ישראליות שלטו בענף זה בראשיתו: אופטרוטק ואורבוט שהתמזגו לחברת אורבוטק.
לאחר התבגרות מערכות הבדיקה למעגלים מודפסים ללא רכיבים (Unpopulated Printed Circuit Boards), החל השוק לאחרונה השוק לאמץ מערכות AOI לבדיקת מעגלים מודפסים מורכבים (Printed Circuit Board Assembly).
אלא שכאן מדובר באתגר לא פשוט. יש צורך בניתוח תמונה מורכבת וזיהוי של פריטים שונים בתמונה בעלת אזורים עם ניגודיות מאוד נמוכה. למשל, חשוב להבדיל בין רגל של הרכיב לבין הבדיל שעליו, כאשר ברוב המקרים גם הרגל וגם הבדיל בעלי אותו צבע בדיוק. בנוסף, הצורך בבדיקת האיכות של ההלחמות מאלץ להוסיף מימד שלישי לבדיקה, לצורך קבלת אינפורמציה של גובה. למשל לאיזה גובה "טיפס" הבדיל במעלה הרכיב (מיניסקוס), מה גודל ההרטבה של הפד וכיוצא בזה. זאת בנוסף להתמודדות עם הטופוגרפיה של המעגל המורכב, שיצרה בעיות של הסתרות והצללות, הנובעות מהתקנת רכיב גבוה ליד רכיב נמוך.
הרכיבים הזעירים יצרו אתגר חדש
מזעור הרכיבים הצריך ירידה של גודל הפיקסל מ-20 מיקרון לכ-10 מיקרון, והתוצאה היא ירידה בקצב הסריקה ובעיות בזיהוי כיתוב. שכן קריאת כתוביות על-גבי רכיבים גבוהים דורשת עומק שדה גדול, ואילו עבודה ברזולוציה נמוכה מ-20 מיקרון דורשת עומק שדה קטן מאוד. דרישות סותרות אלה מחייבות את מתכנני מכונות הבדיקה האוטומטית להפגין יצירתיות יוצאת דופן.

מערכות ה-AOI הראשונות התבססו על הדמאה (Imaging) דו-מימדית והשתמשו בתאורה עילית מונוכרומטית בגוני אפור. אולם שיטה זו גילתה כמות מאוד מזערית של התקלות. הדור הבא של מערכות דו-מימדיות התבסס על ריבוי מצלמות כדי שהמערכת תוכל להביט על נקודות מסוימות בזוויות שונות כדי לקבל יותר מידע. דור זה של מכונות נחשב בזמנו לפריצת דרך ביכולת של מערכות הבדיקה האופטיות. הוא התגבר חלקית על הצללות מסוימות והאינפורמציה שנרכשה מהמעגלים הייתה מגוונת בהרבה מהמערכות הקודמות. אולם בעיית ההסתרה נותרה בעינה.
היא אף החמירה כאשר המערכת ניסתה לרכוש תמונה זוויתית של רכיב נמוך הנמצא לצד רכיב גבוהה. למרות בעיית ההסתרות, המערכות הצליחו להבין יותר במדויק היכן נמצאות רגלי הרכיב והיכן הבדיל מתחיל לטפס על-גבי הרגל.
אינפורמציה חיונית ליכולת המכונה להבין את המתרחש במעגלים המורכבים. אולם הכנת תוכנית הבדיקה הייתה מורכבת והצריכה שעות רבות של מהנדסי הבדיקה. בנוסף, האלגוריתמים שניסו להבין את התמונות בזוויות השונות היו מורכבים ורחוקים ממושלמים. בשורה התחתונה, גם מכונות אלו סבלו מבעייה של תקלות-שוא כאשר ניסו לתכנת אותן לאתר את התקלות הקשות יותר, לצד מספר רב של תקלות שכלל לא התגלו.
ריבוי מקורות-תאורה
בשלב הבא עברו יצרני מערכות ה-AOI לעיבוד תמונה בצבע ולתאורה רב-זוויתית. במכונות מסוג זה יש מצלמה עילית אחת ותאורה ממספר כיוונים ב-3-4 צבעי תאורה, צבע לכל זווית. שיטה זו מצליחה "לסחוט" מהמעגל המורכב אינפורמציה שבעבר אפילו מערכת מרובת מצלמות לא הייתה מסוגלת לקבל.
השיטה מאפשרת קבלת תמונה צבעונית כאשר כל צבע מגדיר את זווית המשטח. בדוגמא למטה ניתן להבחין במשטחים אופקיים הצבועים בצבע אדום, משטחים העולים בזוית כהה צבועים בצבע ירוק ובמשטחים בזווית חדה בצבע כחול. יש לשים לב שהצבעים בתמונה אינם תואמים לצבעים האמיתיים של הרכיב. על-מנת לקבל תמונה צבעונית רגילה של הרכיב יש צורך לצלמו בתאורה לבנה אחידה. כאשר מנתחים את התמונה המתקבלת מהתאורה הרב זוויתית ניתן ללמוד היכן עולה הבדיל על רגלי הרכיב, איזה משטחים בפד מכוסים בדיל אופקי והיכן מתחיל ונגמר המיניסקוס.

זיהוי הרכיב ומיקומו המדויק במעגל המורכב
על-מנת לגלות את כל מגוון התקלות על-גבי המעגל המורכב, המכונה צריכה לזהות את מיקומו המדויק של הרכיב ולדעת היכן כל אחד ממרכיביו נמצא באופן אבסולוטי. משימה זו היא הבסיס לכל שאר הבדיקות שייעשו לאחר מכן. מיקומו של הרכיב על הפדים יכול להשתנות. כאשר רוצים לבדוק את ההלחמות חייבים לדעת היכן בדיוק נמצאות ההלחמות על-גבי הפדים, ובמיקום המדויק הזה לבצע את הבדיקה.

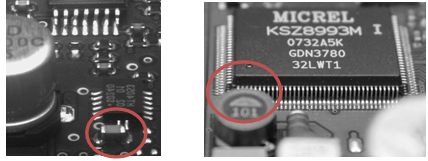
אם נביט שוב ברכיב הפשוט שבתמונה נראה שהפרש הצבעים בין גוף הרכיב לבין המעגל המודפס מאוד נמוך וכמעט לא קיים. על-מנת שהמערכת תדע היכן ממוקם הרכיב יחסית למיקום הפדים, היא צריכה להבחין בין גוף הרכיב לבין המעגל המודפס. משימה קשה עבור מערכת דו-מימדית, שהצלחתה תלויה בצבע הרכיב ומשטח המעגל המודפס, בניגודיות ובמבנה הגיאומטרי של הרכיב. אולם אם היה למערכת תמונה תלת-מימדית של הרכיב – הזיהוי היה פשוט למאוד, מכיוון שמדידת גובה הרכיב נותנת מידע מדויק לגבי הימצאות וסטיית מיקומו בלי תלות בניגודיות, בצבע ובבהירות משטח המעגל המודפס. כלומר, הגילוי מבוסס על גובה ולא על צבע, לכן הזיהוי חד-ערכי ומדויק.
בעיה דומה היא זיהוי מיקומם המדויק של הרגליים ברכיבי QFP. ההחלמה על רגל הרכיב צריכה להיות בחלק הרגל הצמוד למעגל המודפס. לשם כך יש לזהות את כל חלקי הרגל באופן מדויק, כדי לבצע את הבדיקה במקומות הנכונים. הזיהוי בתמונה דו-מימדית קשה משמעותית בהשוואה לתמונה תלת-מימדית המספקת את ערכי הגובה של הרגליים ברכיבי QFP.

מגוון התקלות על-גבי מעגלים מורכבים
המורכבות של גילוי תקלות במעגלים מורכבים נובעת מסוג התקלות שאותן צריכה המכונה לגלות. התקלות במעגלים מודפסים מורכבים כוללות:
- חוסר ברכיב
- חוסר רגיסטרציה (רכיב לא במקומו המדויק)
- רכיב הפוך
- רכיב על הצד
- רכיב ניצב (Tombstone)
- רכיב הנשען על ההלחמה בצד אחד (Head on Pillow)
- רכיב לא בקוטביות הנכונה
- קצר בין רגלי הרכיב
- חוסר בדיל
- עודף בדיל
- הלחמה קרה
- בעיות מיניסקוס
- הרטבה לא מספקת
- רגל באוויר ברכיבי QFP
- כדור בדיל
- רכיב מונח בזווית (המשטח העליון של הרכיב לא מקביל למעגל המודפס)
- רכיב לא נכון (התווית שעליו לא תואמת לרכיב הנכון)
- רכיבי BGA שאינם מולחמים טוב
- רכיבי QFN שאינם מולחמים טוב
ניתן לגלות רבות מתקלות אלו על-ידי מערכת צבעונית בדיוק די גבוה (אם כמובן הצלחנו במשימת גילוי מדויק של מיקום הרכיב וכל מרכיביו). אולם מערכות AOI דו-מימדיות מתקשות לגלות תקלות מסוימות, כגון רגליים באוויר ברכיבי QFP, הלחמות קרות, Head On Pillow וכיוצא בזה. המתכנתים של מכונות ה AOI הסתגלו למצב שבו אם הם רוצים ליצור תוכנית שתמצא את מרבית התקלות, הם יתקלו בכמות בלתי רצויה ובלתי הגיונית של תקלות שווא. לכן משתמשים רבים מוותרים מראש על גילוי תקלות אלו. לעומת זאת, יש תקלות שמכונות דו-מימד לעולם לא יגלו: תקלות ברכיבי BGA ו-QFN.
מערכות AOI בתלת מימד
התעשייה הבינה שיש צורך בפריצת דרך נוספת, וזו הגיעה ממקום מוכר: מכונות Solder Paste Inspection לבדיקת איכות מריחת משחת הלחמה על גבי המעגל המודפס. גם הן החלו כמכונות דו-מימדיות ומהר מאוד הסתבר שבדיקת איכות המריחה חייבת להיות בדיקה של נפח, כלומר תלת-מימדית. המערכות הראשונות התבססו על טכנולוגיית לייזר יקרה, ומהן התפתחו מכונות מבוססות אור נראה שלא הצריכו מערכות לייזר יקרות ומסוכנות.
מדידת גובה בעזרת אפקט MOIRÉ
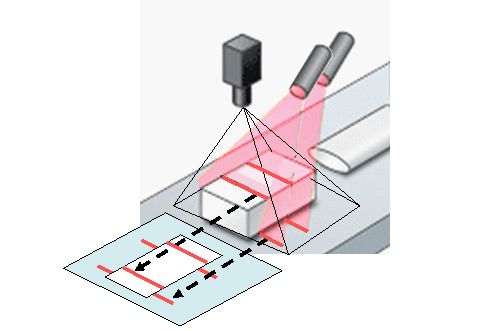
בטכנולוגיה זו מקרינים תבנית של פסים מקבילים בזווית על גבי המשטח, ומצלמים את המשטח עם תבנית הפסים, ממצלמה עילית, (ראה ציור למטה). כאשר התבנית פוגשת בפריט בגובה שונה מגובה המשטח, קווי התבנית נשברים ובתמונת המצלמה מתקבלים מקטעי קווים שבהם עומק השבירה יחסי לגובה הפריט הנבדק, בדומה לקווי גובה טופוגרפיים.
ישנן שתי שיטות עיקריות ליישום טכנולוגית תלת מימד במכונות אופטיות לבדיקת מעגלים מורכבים. שיטה ראשונה הינה שיטה ישנה שיושמה לראשונה במכונות ה SPI הראשונות שעבדו בשל אור נראה ובמכונות AOI מסוימות, וחלקן חדישות יותר שיטה זו מיושמת במכונות 3D-AOI חדישות יותר כגון מכונת SAKI. יישום הטכנולוגיה במכונות ה-AOI התלת-מימדיות של חברת SAKI נקרא Phase Measurement Profilometry (מדידת פרופיל בעזרת מופע) ומבוסס על הקרנת תבנית ערכי אפור ולא קווים. ערכי האפור משתנים בצורת סינוס וכאמור מוקרנים בזווית על-גבי המשטח הנבדק (המעגל המודפס). מדידת הגובה נעשית על-ידי ניתוח הפרשי הפאזה (ΔΦ) בין התבנית שעל המעגל המודפס לבין התבנית שעל הרכיב.כיום רוב מכונות ה-AOI התלת-מימדיות מתבססות על אפקט MOIRÉ.

התפתחות מערכות מבוססות אפקט "מוארה"
המכונות מהדור הראשון התבססו על השיטה שפותחה במערכות ה-SPI הקיימות בשוק. מבצעים הקרנה ממקור אור המוקרן דרך תבנית של פסי מתכת. האור העובר דרך תבנית המתכת יוצר תבנית פסים על גבי המשטח הנבדק. מכיוון שהיא לגל ריבועי, היא מאבדת חלק מיכולות הדיוק התיאורטית של אפקט "מוארה", המתבסס על ניתוח הפרשי פאזה בין התבניות. כידוע בגל ריבועי יש בעיה לזיהוי של הפרשי פאזה בצורה מדויקת. בנוסף כדי לבצע הקרנות של תבניות שונות (שאת הצורך שבהם נפרט בהמשך) יש לשנות באופן מכני את תבניות המתכת או להזיז אותן באמצעים מכניים מורכבים למדי.
 בהמשך שולבו CMOS מיוחדים המשמשים במקרנים תעשייתיים. הם מאפשרים הקרנת תבניות שונות לפי הצורך, ושינוי של התבנית המוקרנת כדי ליצור בדיקות נוספות לפי הצורך. שיטה חדשנית זו מיושמת במכונות ה-AOI של חברת SAKI.
בהמשך שולבו CMOS מיוחדים המשמשים במקרנים תעשייתיים. הם מאפשרים הקרנת תבניות שונות לפי הצורך, ושינוי של התבנית המוקרנת כדי ליצור בדיקות נוספות לפי הצורך. שיטה חדשנית זו מיושמת במכונות ה-AOI של חברת SAKI.
שימוש בתבניות הקרנה שונות

הטופוגרפיה המגוונת של מעגלים מודפסים מורכבים מצריכה התייחסות נפרדת לרכיבים בגבהים שונים. קבלים אלקטרוליטיים נמצאים בגובה שונה לגמרי מרכיבי BGA ורכיבי 0201. המשטח העליון של מחברים גבוה משמעותית מהלחמות הרגליים שלהם. כאשר יש צורך למדוד את גובה משטחו העליון של הקבל ולמדוד את גובה הלחמת רגלי רכיב ה-QFP יש צורך בטווח מדידה רחב מעבר לטווח המדידה של הקרנה בתדר אחד, ולכן יש צורך בשתי צורות מדידה שונות, או בשתי רזולוציות של מדידה.
המערכות משיגות את הרזולוציה הזו באמצעות הקרנת תבניות ברוחבי פסים שונים לצורך מדידת גבהים שונים. תדר הפסים הגדול נועד למדידת גבהים של 0-2.5 מ"מ, והתבנית בעלת התדר הנמוך מיועדת למדידת אירועים הגבוהים משמעותית מעל לגובה המעגל המודפס, עד 20 מ"מ, כגון קבלים ומחברים. כדי להקרין את שתי התבניות האמורות יש צורך במקרן נוסף כאשר עובדים בשיטת העבודה הישנה (דור ראשון). בשיטה החדשה משתמשים ברכיב המאפשר שינוי תבנית ההקרנה באמצעים אלקטרוניים.
גובה של רכיב שחור והלחמה מבריקה
בכול צילום יש צורך למצוא את התאורה האופטימלית והמתאימה לצרכי הצילום. על-גבי המעגל המודפס מורכבים רכיבים בצבעים שונים ויש בעיה למצוא תאורה המתאימה למשל לרכיבים כהים מול הלחמות מבריקות. על מנת שנוכל לקבל משני המשטחים תמונה טובה של התבנית יש צורך להקרין את התבנית באור חזק עבור רכיבים שחורים, ובאור חלש עבור רכיבים בהירים והלחמות מבריקות.
חדירה למקומות צרים
כאשר יש צורך למדוד גבהים למשל בין שתי רגליים של רכיב QFP בעל צפיפות (Pitch) גבוהה, לעיתים תדר ההקרנה הגבוה אינו מספיק. בעיה זו נפתרה על-ידי צילום ברצף של שתי תמונות בתדר הקרנה זהה עם הסטה זעירה של הקרנת הפסים בין שתיהן.
כמה תמונות מצלמים בכל בדיקה תלת-מימדית?
התשובה היא 8 תמונות של תבניות מצולמות לכל בדיקה:
- תמונת פסים צפופה בהירה
- תמונת פסים צפופה בהירה מוסטת
- תמונת פסים רחבה בהירה
- תמונת פסים רחבה בהירה מוסטת
- תמונת פסים צפופה כהה
- תמונת פסים צפופה כהה מוסטת
- תמונת פסים רחבה כהה
- תמונת פסים רחבה כהה מוסטת
זוכרים את טכנולוגית הדו-מימד? משתמשים גם בה
כדי לקבל תמונה אמיתית של המעגל המורכב ולא רק תמונת פסים אנו משתמשים גם בטכנולוגיה דו-מימדית רב-צבעית. חלק מהבדיקות נעזר ב"מפה הטופוגרפית" המתקבלת ממערך ההארה הרב-צבעי (multi color) למשל בדיקות הרטבה נעשות עלידי תאורת דו-מימד רב-צבעית. חברות מסוימות (דוגמת SAKI) מוסיפות עוד שני רכיבי תאורה הנקראות Top ו-Low. הן מהוות נדבך נוסף ברכישת המידע מהמעגל המורכב ומיועדות במיוחד לבדיקת המקטעים הנמוכים יותר של המיניסקוס ולקריאת כיתובים על גבי הרכיבים.
כך שתאורה הכוללת את כל הרכיבים לקבלת תמונה עם מירב הפרטים מהמעגל המודפס תכלול שש סוגי תאורות שונות (ראה ציור). משתמע מכך שמערכת הבדיקה המשתמשת בתאורות אלו תרכוש שש תמונות נוספות לבדיקת הדו-מימד.
במסתכם, בכול איזור בדיקה יירכשו 14 תמונות: 6 לדו-מימד ו-8 לתלת-מימד

הצללות והסתרות
במקרים רבים, כאשר מאירים מהצד רכיבים גבוהים, הם מטילים צל על הרכיבים הנמוכים ויוצרים הצללות. במקרים כאלה הקרנת תבנית הפסים לא תגיע לרכיב הנמוך ולא תתאפשר מדידת גובה במיקום המוצל. הדבר נכון למכלול התאורות הנזכרות לעיל.
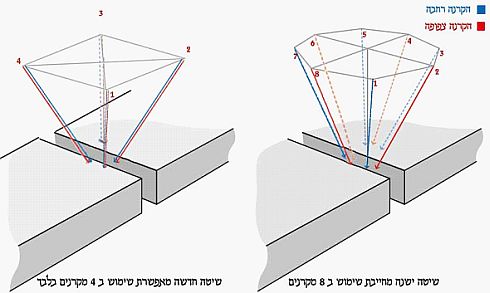
מהתמונה למעלה רואים שאם נקרין את תבנית הפסים מכיוון אחר לא תהיה הצללה. לכן כדי להתגבר על בעיית ההצללות מאירים את מכלול ההארות המוזכרות מארבעה כיוונים שונים, צפון דרום מזרח ומערב. מכונות העובדות עם הקרנת תבנית "מוארה" (MOIRÉ) בשיטה החדשה המשתמשת ברכיבי Liquid Crystal on Silicon כמו למשל SAKI, כוללות ארבעה מקרנים בתבנית MOIRÉ (ראו מונה למטה), לעומת מכונות בשיטה הישנה הזקוקות ל-8 מקרנים – ארבעה מקרנים לתבנית הצפופה וארבעה לתבנית הרחבה. יש לשים לב שבשיטה הישנה התבניות אינן יוצאות מאותה זווית במדידה הרחבה והצפופה, ולכן צורת הקרנה זו עלולה לגרום לחוסר הדירות בין שתי המדידות.
לאחר שהארנו את האזור המצולם מארבעת הכיוונים וצילמנו אותו בכל התאורות וההקרנות הנחוצות, אנו מפיקים תמונה תלת-מימדית של הלוח ביחד עם תמונה "טופוגרפית" ותמונה צבעונית רגילה. מכונות AOI צריכות להיות מסוגלות לנתח את כל התמונות שהתקבלו ולאתר את התקלות על-גבי המעגל המורכב.
גודל הפיקסל
רוב מכונות ה-2D עובדות היום בגודל פיקסל של 18-20 מיקרון. הוא מתאים לרכיבי 0201, אולם כניסתת רכיבים בגודל של 01005 לקווי הייצור דורשת פיקסל בגודל של 10-12 מיקרון. אלא שלכך יש מחיר ויש צורך לבצע בחירה זהירה של גודל פיקסל האופטימלי לאפליקציה. ככול שהפיקסל יותר קטן נראה יותר פרטים ונוכל לבדוק רכיבים קטנים יותר, אבל מערכת העובדת עם פיקסל קטן מ-10 מיקרון צריכה להתמודד עם בעיות פיסיקליות מורכבות.
מהירות הסריקה
שטח הפיקסל הוא אורך הצלע שלו בריבוע. מכאן שאם מקטינים את הפיקסל במחצית, מ-20 מיקרון ל-10 מיקרון, מהירות הסריקה תקטן פי ארבעה! כלומר מעגל שזמן הסריקה שלו היה 0.5 דקות, ייסרק עכשיו ב-2 דקות.

עומק שדה (Depth Of Field)
פרמטר זה מגדיר את הגובה המקסימלי בו משטחו העליון של הרכיב יהיה בפוקוס. ככול שגודל הפיקסל יותר קטן ה-ZOOM שבו משתמשת המכונה הוא יותר גדול ובהגדרה עומק השדה (שבו נשמרת החדות) קטן באופן מאוד משמעותי. לכן במכונות אלו יהיה מאוד קשה לקרוא את הכיתובים על רכיבים בגבהים שונים.
במכונות תלת-מימד אין צורך להקטין את גודל הפיקסל על מנת לבדוק רכיבים זעירים. הדיוק הגבוה במדידת הגובה (רזולוציה של עשירית פיקסל. משמע במכונה של 18 מיקרון כמו של SAKI, הדיוק במדידת גובה הוא 1.8 מיקרון) מייתרת את הצורך להקטין את גודל הפיקסל של מכונות העובדות ברזולוציה של 18 מיקרון בעבודה עם רכיבי 01005. כך מרוויחים גם מהירות סריקה וגם עומק חדות.
לעומת זאת, במכונות תלת-מימד שבהן גודל הפיקסל הוא 20 מיקרון, יש צורך בהקטנת גודל הפיקסל לעבודה על רכיבים אלו.המערכת של SAKI למשל, מספקת מהירות סריקה גבוהה של רכיבי 01005, ביחד עם חדות גבוהה.
שימוש בטכנולוגית תלת-מימד במכונות AOI
מכונות ה-AOI נבדלות אחת מהשנייה גם ביכולת הניתוח של מכלול התמונות שנרכשו וקבלת החלטות לגבי תקלות במעגל. אחד האלגוריתמים החשובים ביותר במכונות של SAKI הוא אלגוריתם הבודק את רמת המקבילות של המשטח העליון של הרכיב, למשטח המעגל המודפס עצמו, שבמקום שבו הרכיב מורכב. כידוע מעגלים מורכבים נוטים לקבל עיוותים מסוימים עקב חימום ומשקל הרכיבים, במיוחד במעגלים דקים. כדי לדעת אם הרכיב או רגל הרכיב אינם מקבילים למעגל המודפס יש לחשב את זווית המעגל המודפס בכל אחת מהתמונות הנרכשות.

לאחר חישוב זווית המעגל המודפס, המערכת מתחשבת את הזווית היחסית בינו לבין הרכיב, וכל חריגה מגבולות מוגדרים תיחשב לתקלה. בצורה זו מכונות SAKI מזהות תקלות שכמעט ולא ניתן לגלותן במערכות דו-מימדיות. בהן: תחילת תהליך ההתרוממות של רכיב קטן (Tombstoning of Chip Component) או רכיב BGA שלא הולחם כראוי או שהולחם חלקית. בדוגמה שבצילום למעלה, גובה הרכיב נמדד בשני קצותיו והשיפוע שלו מחושב בצירים X ו-Y. במידה וגובה הרכיב באחד מהקצוות חורג מההגדרה המותרת, המערכת תתריע על תקלת התרוממות (Tombstoning).
זמני תיכנות, ספריות ותיכנות רכיבים חדשים
זמן הכנת הלוח לריצה (זמן התיכנות) הוא אחד מהפרמטרים החשובים בבחירת מכונת AOI. אחת מהסיבות המרכזיות לאי-הוספת מצלמות צד במכונות AOI דו-מימדיות היתה הצורך בזמן תיכנות ארוך ומסורבל.
מכונות התלת-מימד מביאות איתן בשורה חדשה בתחום זה. בדיקת תלת-מימדית מעניקה מידע גובה מדויק בכל המעגל המורכב הכולל את הרכיב, הפדים ואת אזורי ההלחמה. לרכיבי SMD יש צורה מוגדרת (מרובעת או עגולה) והמערכת התלת-מימדית מזהה אוטומטית את הגיאומטריה של הרכיב. אזורים שבעבר דרשו הגדרה ידנית (למשל מספר וצפיפות הרגליים QFP) מוגדרים כעת אוטומטית.

המערכת מודדת את הפרמטרים השונים על-פני הרכיב (למשל גובה ההלחמות), מבצעת ניתוח סטטיסטי של הגבהים מחשבת את הפרמטרים לתוכנית. יכולות אלו מאפשרות לתכנת רכיב מסובך ולהכניס אותו לספריית הרכיבים בלחיצת עכבר אחת. יכולת חדשנית זו מקצרת משמעותית זמן ההכנה והתיכנות ומבטלת כמעט כליל את הצורך בכיוונון ואופטימיזציה ידניים.
מכונת ה-3D AOI של SAKI רוכשת את תמונת המעגל המודפס והרכיבים המורכבים עליו ומספקת למפעיל תמונה תלת-מימדית בזמן אמת. התמונה ניתנת להגדלה, הקטנה וסיבוב של האזור הנבדק, ועל-ידי כך יכול המפעיל בעמדת התיקון לסווג את התקלות שהמערכת מצאה.

שיעור גילוי ותקלות שווא
מערכות דו-מימדיות מתמודדות עם הדילמה הקלאסית של מערכות בדיקה: הרצון לגילוי מירבי של תקלות הצריך תיכנות הדוק ורמת רגישות גבוהה, שגרמות להתראות שווא רבות.
דילמה זו אינה קיימת במערכות 3D AOI: היכולת למדוד גובה הוסיף מימד חדש ליכולת הבדיקה, הגילוי והסינון של תקלות. למעשה כבר אין צורך באופטימיזציה של התיכנות והורדת רגישות על-ידי שחרור טולרנסים. מדידת הגובה מאפשרת ניתוח מדויק ואמיתי של התמונה המתקבלת והיכולת למדוד את האירועים בכול שלושת המימדים. כלומר ניתן למקסם את שיעור הגילוי בלי "לשלם" בכמות גדולה של תקלות שווא.
סיכום
בעשור האחרון נכנסו לתעשייה מערכות בדיקה אופטיות דו-ממדיות (2D AOI) כתחליף לבדיקה חזותית ידנית. כיום הן מוחלפות בהדרגה במערכות אופטיות תלת ממדיות 3D AOI.
המערכות התלת-מימדיות נמצאות אומנם בתחילת דרכן, ועדיין לא מיצינו את כל הפוטנציאל הגלום בטכנולוגיה הזו, אולם כבר עתה ברורים יתרונותיהןבהשוואה למערכות הדו-מימדיות. הטבלה למטה מספקת השוואה בין מערכות AOI תלת-מימדיות ומערכות AOI דו-מימדיות.
לחץ כאן להורדת טבלת השוואה מפורטת בין מערכות AOI דו-מימדיות ותלת-מימדיות
פורסם בקטגוריות: חדשות , ייצור וקבלנות משנה , תעשייה וניהול
פורסם בתגיות: featured


