אנבידיה חשפה אתמול (ב') בכנס GTC לראשונה את התצורה המלאה של פלטפורמת Vera Rubin, שהיא הדור הבא של תשתיות בינה מלאכותית שנועד לתמוך בעידן הסוכנים (Agentic AI). בניגוד לדורות קודמים שהתבססו על שרתים בודדים, Rubin מוצגת כמערכת שלמה בתצורת rack-scale, שבה מספר ארונות ייעודיים פועלים יחד כסוג של “מפעל AI” מלא.
הארכיטקטורה כוללת מספר סוגים של מסדים (racks), שכל אחד מהם אחראי על שכבה אחרת במערכת: GPU racks מבוססי Rubin מבצעים את החישובים הכבדים דוגמת אימון מודלים והסקה בזמן אמת, CPU racks מנהלים את סביבת העבודה, הסוכנים השונים והלוגיקה התפעולית, מסדי האיחסון (storage racks) מנהלים את משאבי הזיכרון וההקשר (context) של מודלים גדולים, ומסדי קישוריות (networking racks) מחברים את כל המערכת באמצעות תשתיות תקשורת מהירות. לצד אלה משולבים גם מאיצי הסקות ייעודיים המיועדים להאיץ את תהליך הפקת התשובות.
ה-CPU חוזר למרכז הבמה
אחד מהחידושים הבולטים בארכיטקטורה בא לידי ביטוי במסד Vera CPU rack: ארון ייעודי המכיל מאות מעבדים ונועד להתמודד עם עומסי העבודה החדשים של סוכני AI. בעולם ה-AI המסורתי, עיקר העומס היה על ה-GPU, בעוד שה-CPU שימש כרכיב תומך. אך בעידן הסוכנים, חלק גדול מהפעילות עובר דווקא ל-CPU: הרצת קוד, הפעלת כלים, ניהול תהליכים, בדיקות תוצאה וסימולציות. בכל מסד מותקנים עד 256 מעבדי Vera. הוא יכול להריץ עשרות אלפי סביבות CPU במקביל, כאשר כל סביבה פועלת באופן עצמאי.
המעבד עצמו מבוסס על 88 ליבות נפרדות בעלות רוחב פס גבוה של עד עד 1.2 טרה־ביט לשנייה. אחד ההיבטים הקריטיים כאן הוא החיבור הישיר שבין ה-CPU ל-GPU באמצעות NVLink, שמאפשר שיתוף נתונים במהירות גבוהה. המשמעות היא שה-CPU כבר אינו רק “מנהל” את ה-GPU, אלא חלק אינטגרלי מהחישוב עצמו.
התפקיד החדש של אינטל
במקביל להכרזה של אנבידיה, הודיעה חברת אינטל שמעבדי Xeon 6 שלה נבחרו לשמש כמעבקים המארחים (Host CPU) במערכות DGX Rubin NVL8 של אנבידיה. מדובר בשרתים הכוללים 8 מעבדי GPU ומהווים את יחידת הבסיס של המערכת.במערכות האלו אחרי מעבד Xeon אחראי על ניהול ה-GPU, תזמון משימות והזרמת נתונים. היתרונות המרכזיים של Xeon בהקשר זה הם תמיכה בנפחי זיכרון גדולים במיוחד, רוחב פס גבוה ותאימות רחבה לתשתיות קיימות.
המעבד תומך בנפח זיכרון של עד 8 טרה-בייט המאפשר טיפול במודלי AI גדולים ובמטמוני KV cache גדולים בתהליך ההסקה. אינטל שילבה בו את טכנולוגיית הזיכרון החדשה MRDIMM המספקת רוחב פס מהיר פי 2.3 בהשוואה לדור הקודם, ואת טכנולוגיית Priority Core Turbo להקצאת ליבות ייעודיות למשימות תזמור קריטיות, ואת טכנולוגיית האבטחה Intel TDX. היא מספקת הגנה והצפנה של זיכרון ומצב ה-CPU בסביבות AI, כך שמודלים ומידע רגיש נשמרים מוגנים גם בזמן העיבוד עצמו. קבוצות הפיתוח של אינטל בישראל המתמחות באבטחת חומרה, וירטואליזציה ופתרונות Confidential Computing למרכזי נתונים ול-AI מילאו תפקיד מרכזי בפיתוח טכנולוגיית TDX.
עם זאת, בארכיטקטורה החדשה של Rubin, תפקיד זה הופך לחלק קטן יותר מהתמונה הכוללת. המעבר מ-Blackwell ל-Rubin ממחיש היטב את השינוי: בדור הקודם, מערכות AI התבססו בעיקר על שרתים מסוג DGX או HGX, שבהם כל יחידה כללה GPU של אנבידיה לצד מעבד CPU (לרוב של אינטל). כלומר, ה-Xeon היה רכיב מרכזי כמעט בכל שרת. בפלטפורמת Rubin, לעומת זאת, המערכת כבר אינה מבוססת על אוסף של שרתים זהים, אלא על מערך הטרוגני של מסדים ייעודיים בעלי תפקידים שונים.
ה-Vera CPU rack הופך לשכבה שמריצה את הסוכנים ואת הלוגיקה של המערכת כולה, בעוד שמעבדי Xeon נותרים בעיקר בתפקיד ה-host במערכות NVL8. במילים אחרות, אינטל עדיין נמצאת בתוך המערכת — אך כבר אינה מהווה את הבסיס שלה. התמונה הכוללת מתבהרת: אנבידיה ממשיכה במסע הארוך המיועד להביא אותה למצב שבו היא מחזיקה בשליטה מלאה בכל תשתיות הבינה המלאכותית: מה-GPU דרך ה-CPU ועד לרשת ולאחסון.
ראוי לציין שלמרות שהיא ששיתוף הפעולה עם אינטל הוא ארוך טווח ואסטרטגי, החברה בונה במקביל אלטרנטיבה פנימית שמציבה אותה בעמדה חזקה יותר לאורך זמן. יותר מזה, הפלטפורמה החדשה מעצבת מחדש את מבנה מרכזי הנתונים. המעבר משרתים כלליים לתשתיות ייעודיות ל-AI שבהן גם המעבד המרכזי מותאם לעידן הסוכנים, עשוי להגדיר מחדש את לא רק את מבנה "מפעל ה-AI", אלא גם את חלוקת התפקידים בין ענקיות השבבים.
נאום הפתיחה אמש של מנכ"ל אנבידיה ג'נסן הואנג ב-GTC:
חברת אנבידיה (NVIDIA) הכריזה השבוע על חתימת הסכמי שיתוף פעולה אסטרטגיים וביצוע השקעה כוללת בהיקף של כ-4 מיליארד דולר בשתי חברות הפוטוניקה האמריקאיות Coherent ו-Lumentum. במסגרת ההסכם, אנבידיה מבצעת השקעה של כ-2 מיליארד דולר בחברת קוהרנט כדי לסייע לה להגביר את המחקר והפיתוח של טכנולוגיות תקשורת אופטית, ולהגדיל את קיבולת הייצור בארצות הברית. ההסכם כולל גם התחייבות רכש של אנבידיה בהיקף של כמה מיליארדי דולרים, הבטחת קיבולת ייצור עתידית של קוהרנט לצורכי אנבידיה, וקבלת גישה אל טכנולוגיות לייזר וקישוריות אופטית שיפותחו בחברת קוהרנט.
ההסכם עם לומנטום כולל גם הוא השקעה בחברה בהיקף של כ-2 מיליארד דולר, התחייבות לבצע רכש בהיקף של כמה מיליארדי דולר וקבלת זכויות גישה של אנבידיה לטכנולוגיות לייזר עתידיות של לומנטום. אנבידיה הסבירה את העסקאות בכך שקישורים אופטיים ואינטגרציה מתקדמת ברמת המארז (Advanced Packaging) מהווים יסוד לשלב הבא של תשתיות בינה מלאכותית, מכיוון שהם מאפשרים קישוריות ברוחב-פס גבוה מאוד לשיפור היעילות האנרגטית של מרכזי בינה מלאכותית (AI factories).
בעקבות ההודעה זינקה מניית אנבידיה בנסד"ק ביותר מ-5% והיא נסחרת כעת לפי שווי שוק של כ-4.43 טריליון דולר. מניית קוהרנט זינקה בבורסה של ניו יורק (NYSE) בכ-20% ומעניקה לחברה שוווי שוק של כ-56 מיליארד דולר, ומניית לומנטום עלתה בכ-12% במסחר בנסד"ק, ומעניקה גם לה שווי חברה של כ-56 מיליארד דולר.
חוליות קריטיות בשרשרת האספקה האופטית
חברת Coherent, שבסיסה בפנסילבניה, היא אחת מהחברות הוותיקות בעולם הלייזרים והחומרים הפוטוניים. החברה מתמחה בפיתוח וייצור מקורות לייזר מבוססי חומרים מסוג III-V, רכיבי סיליקון פוטוניקס, מנועי אופטיקה מתקדמים ואריזות שבב ברמת דיוק גבוהה. החברה מספקת רכיבי לייזר ואופטיקה ליצרני ציוד רשת, חברות שבבים וספקיות ענן גדולות, וכן לחברות תעשייה, ביטחון וחלל הזקוקות למערכות לייזר מתקדמות. קוהרנט מפעילה מתקני ייצור מתקדמים, שהרחבתם במסגרת ההסכם עם אנבידיה משתלבת גם במדיניות האמריקאית לחיזוק ייצור מקומי של תשתיות קריטיות.
תפקיד הלייזר במרכזי הנתונים הגדולים הוא מרכזי, מכיוון שהוא אחראי על שידור מהיר של האותות האופטיים. הוא משולב במודולי תקשורת אופטיים המותקנים בכרטיסי רשת ובמתגי InfiniBand ו-Ethernet, ומייצר את האותות האופטיים המשמשים להעברת מידע בין שרתים, מסדים ואשכולות עיבוד (ו-GPU). כיום מדובר במהירויות של כ-800Gbps, כאשר המערכות המתקדמות ביותר מתחילות לספק מהירויות העברת נתונים של 1.6Tbps ו-3.2Tbps.
חברת לומנטום הוקמה בשנת 2015 בעקבות יציאתה מ־JDSU, שהייתה אחת החברות הגדולות בעולם בתחום רכיבי התקשורת האופטית בשנות ה־90 וה־2000. היא מתמקדת בפיתוח מודולי תקשורת אופטיים ורכיבי לייזר למרכזי נתונים ולרשתות מהירות. החברה מפתחת מקמ"שים (Transceivers) מהירים, לייזרי VCSEL ורכיבי מודולציה המשולבים בתוך כרטיסי רשת ומתגים למרכזי נתונים. שתי החברות בעלות טכנולוגיות משלימות: קוהרנט מספקת את מקורות האור ושכבת היסוד הפוטונית, ואילו לומנטום מספקת את המודולים המשולבים בתשתיות מרכזי הנתונים.
החטיבה הצומחת ביותר באנבידיה
חברת אנבידיה השיקה בשנים האחרונות פתרונות Silicon Photonics במתגי InfiniBand ו־Ethernet, ומובילה פיתוח טכנולוגיות Co-packaged Optics. שתי ההשקעות החדשות מבטיחות לה גישה מועדפת לקיבולת ייצור, לטכנולוגיות חדשות ויכולת השפעה על מפת הדרכים הטכנולוגית. למהלך תהיה השפעה גדולה מאוד על חטיבת הקישוריות של אנבידיה שמרכזה בישראל, אשר הוקמה בעקבות רכישת מלאנוקס בשנת 2019.
החטיבה הזו אחראית על פיתוח וייצור שבבי InfiniBand, Spectrum Ethernet, BlueField DPU ופתרונות קישוריות המאפשרים לעשרות אלפי מעבדי GPU לתפקד במתכונת של אשכול מחשוב אחד. בדו"ח הרבעון האחרון של 2026, דיווחה אנבידיה שמכירות תחום הקישוריות הגיעו לשיא כ-31 מיליארד דולר – בערף פי 10 מהיקף המכירות של מלאנוקס. הדבר הופך את החטיבה לאחד ממנועי הצמיחה המרכזיים של אנבידיה.
המהלך האחרון מחזק את זרוע הקישוריות של אנבידיה. הדורות הבאים של מתגי ה־InfiniBand וה־Ethernet, שפותחו ומפותחים כאן, צפויים להישען יותר ויותר על פתרונות פוטוניקה משולבים. הרחבת קיבולת הייצור והעמקת שיתופי הפעולה עם ספקי הלייזר והמודולים האופטיים תומכות ישירות ביכולת של החטיבה להמשיך ולצמוח בקצב הנוכחי, לעמוד בביקושים ולפתח מוצרים מתקדמים יותר. האסטרטגיה של אנבידיה מבוססת על התפישה שמי ששולט ב־GPU, בזיכרון, במתג, ובשכבת האור המחברת את כולם – שולט בארכיטקטורת מרכזי הנתונים של העתיד.
בתמונה למעלה: שבב SN50 של סמבנובה. מקור: SambaNova
חברת אינטל הצטרפה לגיוס ההון החמישי של חברת סמבה-נובה (SambaNova Systems) מפאלו אלטו, קליפורניה, אשר הושלם בהובלת Vista ו-Cambium והגיע להיקף כולל של כ-350 מיליון דולר. ההשקעה של אינטל בוצעה באמצעות זרוע ההשקעות המרכזית שלה, Intel Capital. ביחד עם השלמת הגיוס, הכריזה סמבה-נובה על שבב ההסקות מהדור החמישי שלה, SN50, ועל שיתוף פעולה אסטרטגי ארוך-טווח עם חברת אינטל בפיתוח ואספקת פתרונות הסקת בינה מלאכותית (AI Inference) עתירי ביצועים. שיתוף הפעולה יתבסס על שילוב מעבדי Xeon של אינטל ביחד עם שבבי Reconfigurable DataFlow Units – RDU, ליצירת פתרון חומרה ותוכנה מלא ליישומי AI מבוססי סוכנים (Agentic AI).
המהלך המשותף מיועד לספק חלופה לפתרונות מבוססי מעבדים גרפיים (GPU-centric) שהמתחרה אנבידיה מובילה. במקביל לפיתוח ופריסת המערכות החדשות, אינטל הודיעה שהיא מתכננת לבצע השקעה אסטרטגית ב-SambaNova כדי להאיץ את הפריסה של ענני AI מבוססי טכנולוגיות אינטל. שתי החברות מסרו ששיתוף הפעולה יתמקד בשלושה תחומים מרכזיים: הרחבת שירות הענן של סמבה-נובה המבוסס על הטכנולוגיה שלה; פיתוח תשתית AI משולבת הכוללת את המערכות, התוכנות והשבבים של SambaNova ביחד עם המעבדים, המאיצים וטכנולוגיות הרשת של אינטל; ושיתוף פעולה בשיווק ומכירות באמצעות ערוצי המכירה הגלובליים של אינטל לארגונים ולשותפים עסקיים.
מאיץ ייעודי לסוכני AI
חברת SambaNova הוקמה בשנת 2017 בקליפורניה על-ידי צוות חוקרים ומהנדסים מאוניברסיטת סטאנפורד, ובהם רודריגו ליאנג, קונלה אולוקוטון וכריסטופר רה. מאז הקמתה היא גייסה יותר ממיליארד דולר ממשקיעים, ובחלק מהסבבים הגיעה להערכת שווי שוק של יותר מ-5 מיליארד דולר. החברה פיתחה את ארכיטקטורת RDU במטרה להתגבר על בעייה ספציפית. להערכת החברה הבעיה המרכזית כיום במעבדי הסקה היא לא עוצמת העיבוד, אלא קצב העברת המידע בתוך המעבד. ביישומים מבוססי סוכנים, הבעיה מחמירה, מכיוון שלא ניתן לדעת מתי ואיזה יישום יזדקקו להאיץ את קצב העברת המידע. הארכיטקטורה החדשה מבוססת על עקרון של העברת נתונים מהירה וגמישה, המאפשרת להאיץ את התפוקה הכוללת של עיבוד מרובה סוכנים. להערכת החברה, הפתרון שלה מהיר פי חמישה מכל פתרון אחר הקיים היום בשוק.
בתחילה החברה גיבשה אסטרטגיית מוצר: היא פיתחה מסדי שרתים המהווים פתרון שלם הכולל חומרה, תוכנה ושבבים פרי פיתוחה, שאותם מכרה ללקוחות. הדבר מעניק להם יכולת עיבוד במתכונת של On-prem. כלומר, השרתים יושבים בתוך החברה והיא לא צריכה להוציא את המידע לענן חיצוני, דוגמת OpenAI, Google או אחרים. לאחרונה החברה הגמישה את המודל העסקי והחלה גם בהקמת הענן SambaNova Cloud, אשר מספק שירותי עיבוד במתכונת של Inference as a Service. כלומר, החברה גובה תשלום על-פי תוכניות מנויים או לפי מספר הטוקנים שהלקוחות משתמשים בהם בענן שלה.
התוכנית לבלימת אנבידיה
שיתוף הפעולה האסטרטגי מהווה גם מענה עקיף לשיתופי הפעולה שמובילה אנבידיה אשר מיועדים לקדם את השימוש בתשתיות מבוססות GPU מקצה לקצה, ואף משתפת פעולה עם חברות דוגמת Groq באקוסיסטם הענן שלה. במודל של אנבידיה המאיץ (GPU או שבב ייעודי) הוא לב המערכת, כאשר ה-CPU משמש בעיקר כרכיב מארח ותומך. הדטה סנטר נבנה סביב המאיץ והתקשורת בין מאיצים, כאשר והתוכנות ממוקדות באופטימיזציה של החומרה הזו.
האסטרטגיה של אינטל הפוכה: שיתוף הפעולה עם סמבה-נובה מאפשר לה לספק תשתית הטרוגנית מהירה שבה מעבדי ה-Xeon שומרים על מעמדם בשכבת השליטה והניהול המרכזית. המאיץ – במקרה הזה SN50 – הוא רכיב ייעודי להרצת המודלים עצמם, כאשר עומק והיקף פעילותם מנוהל על-ידי המעבד בהתאם לסוג העומס. במקביל, אינטל ממשיכה לקדם יוזמות AI פנימיות, כולל פיתוח GPU למרכזי נתונים והשקעה בארכיטקטורות האצה.
האם ההשקעה ב-SambaNova משקפת גידור סיכונים מול התחרות ב-GPU, או הכרה בכך שעומסי הסקה – ובפרט Agentic AI – דורשים גישה ארכיטקטונית שונה? אינטל הבהירה בהודעתה ששיתוף הפעולה “אינו משנה את מפת הדרכים של החברה בתחום ה-GPU ואינו פוגע במחוייבותה להתחרות בשוק ה-AI”, אלא מהווה הרחבה של היצע הפתרונות של החברה. כך או אחרת, המהלך ממקם את אינטל מחדש כשחקנית מרכזית שתשפיע על עתיד תשתיות הבינה המלאכותית.
חברת התוכנה הצרפתית דאסו סיסטמס (Dassault Systèmes) וחברת אנבידיה (Nvidia) הכריזו על שותפות אסטרטגית רחבת היקף, שמטרתה לבנות ארכיטקטורת בינה מלאכותית תעשייתית משותפת וליצור דור חדש של פתרונות AI מבוססי תאומים דיגיטליים. ההכרזה נחשפה בכנס 3DEXPERIENCE World שנערך ביוסטון, ומסמנת מהלך משמעותי בניסיון לשלב בין עולמות הסימולציה ההנדסית לבין יכולות החישוב המואץ של NVIDIA.
במרכז השותפות עומדת כוונה לחבר בין פלטפורמת ה-Virtual Twin של דאסו – המאפשרת ליצור מודלים דיגיטליים מדעיים של מערכות פיזיות – לבין תשתיות ה-AI, המודלים הפתוחים וספריות התוכנה של NVIDIA. החיבור אמור לאפשר יצירת “מודלי עולם תעשייתיים” (Industry World Models) המבוססים על מדע ופיזיקה, שישמשו בסיס לבינה מלאכותית אמינה ומדויקת יותר עבור ארגונים.
לפי ההודעה המשותפת, הפתרון החדש לא נועד להיות כלי AI נקודתי, אלא פלטפורמה ארגונית רחבה שתשמש כ"מערכת אמת" (system of record) לתהליכי תכנון, סימולציה ותפעול. המהלך מכוון לענפים עתירי טכנולוגיה כמו הנדסה וייצור מתקדם, תעשיית הרכב, תעופה וחלל, מדעי החיים וחקר חומרים.
כחלק מהמהלך, דאסו תרחיב את תשתיות הענן שלה תחת המותג OUTSCALE ותקים “מפעלי AI” גלובליים שיתבססו על חומרה ותוכנה של אנבידיה. מרכזי חישוב אלה יאפשרו ללקוחות החברה להריץ מודלים כבדים של בינה מלאכותית וסימולציות מורכבות, תוך שמירה על פרטיות נתונים וקניין רוחני – נושא מרכזי עבור תאגידים תעשייתיים.
הפלטפורמה המשותפת צפויה לשלב בין מספר טכנולוגיות דגל של שתי החברות. מצד NVIDIA מדובר בפלטפורמות כמו Omniverse, ספריות CUDA-X ומודלי AI ייעודיים, ומצד דאסו – מערכות BIOVIA למחקר מדעי, SIMULIA לסימולציות הנדסיות ו-DELMIA לניהול ותכנון ייצור. השילוב אמור לאפשר תרחישים כגון האצת פיתוח תרופות וחומרים חדשים, סימולציות הנדסיות מבוססות AI בזמן אמת, ותפעול מפעלים חכמים המבוססים על תאומים דיגיטליים מלאים.
מרכיב מרכזי נוסף בשותפות הוא פיתוח “עוזרים וירטואליים מקצועיים” – סוכני AI שיפעלו בתוך פלטפורמת 3DEXPERIENCE של דאסו ויסייעו למהנדסים, מדענים ומנהלי ייצור בקבלת החלטות על בסיס ידע תעשייתי עמוק. עוזרים אלה יתבססו על מודלים של NVIDIA לצד נתונים והקשר מקצועי שמספקת דאסו.
פסקל דאלוז, מנכ"ל Dassault Systèmes, אמר עם ההכרזה כי "אנחנו נכנסים לעידן שבו בינה מלאכותית לא רק מייצרת תחזיות, אלא מבינה את העולם הפיזי. כאשר AI מבוסס על מדע ופיזיקה מאומתים, הוא הופך למכפיל כוח לחדשנות אנושית." מנכ"ל אנבידיה ג'נסן הואנג, הוסיף כי "AI פיזיקלי הוא החזית הבאה של הבינה המלאכותית, והשותפות עם דאסו תחולל שינוי באופן שבו מהנדסים ומעצבים בונים את התעשיות הגדולות בעולם."
במסגרת האירוע הוצגו גם לקוחות תעשייתיים שכבר בוחנים את הטכנולוגיה החדשה, בהם יצרנית הרכב החשמלי Lucid, חברת האוטומציה היפנית OMRON וקבוצת המזון Bel. כולן הדגישו כי השילוב בין יכולות הסימולציה של דאסו לבין כוח החישוב של NVIDIA עשוי לקצר משמעותית תהליכי פיתוח ולשפר את הדיוק בתכנון מוצרים ומפעלים.
השותפות החדשה מסמנת מגמה רחבה יותר בתעשייה: מעבר מבינה מלאכותית כללית, מבוססת טקסט ותמונות, לבינה מלאכותית תעשייתית שמבינה תהליכים פיזיקליים ומכאניים. עבור דאסו מדובר בצעד אסטרטגי שמחזק את מעמדה כספקית פלטפורמות תעשייתיות מקצה לקצה, ועבור אנבידיה – הרחבת הנוכחות בשוק ה-AI הארגוני והתעשייתי, שנחשב לאחד ממנועי הצמיחה המשמעותיים של השנים הקרובות.
בתמונה למעלה: מרכז הענן הישראלי של חברת נביוס שממנו פועל מחשב העל החדש. צילום: Nebius
מחשב העל הלאומי לבינה מלאכותית החל לפעול ולהיפתח לשימוש התעשייה והאקדמיה, לאחר שחברת Nebius אשר זכתה במכרז של רשות החדשנות, השלימה את הקמת התשתית. עם העלייה לאוויר מתחילה כעת גם ההקצאה בפועל של משאבי מחשוב מתקדמים לחברות הייטק ולחוקרים בישראל, בעלות מופחתת ובזמינות גבוהה, במטרה לאפשר אימון מודלים גדולים בישראל ולהפחית את התלות בתשתיות מחשוב זרות.
הקמת מחשב העל היא תוצאה של תהליך שנמשך מספר שנים. בחודש מאי 2025 זכתה חברת Nebius שמרכזה באסטרדם במכרז רשות החדשנות להקמת מחשב על לאומי בהשקעה כוללת של כחצי מיליארד שקל, מתוכם 160 מיליון שקל במענק ממשלתי. נביוס הציעה לספק עוצמת עיבוד גדולה פי ארבעה מדרישת הסף של המכרז. היא התחייבה להקים בישראל תשתית בעוצמת עיבוד של כ-16,000Petaflop, ולהתחיל לספק את השירותים כבר בתחילת 2026. המחשב פועל ממרכז הענן של החברה (Nebius AI Cloud) שהוקם בשנים האחרונות בעיר מודיעין.
מחשב העל שהוקם במודיעין
החברה חשפה את המרכז לראשונה בחודש אוקטובר 2025, ודיווחה שהוא כולל 4,000 מחשבי NVIDIA HGX B200 המבוססים על ארכיטקטורת Blackwell החדשה של אנבידיה, ומארג קישוריות מבוסס NVIDIA Quantum InfiniBand. מרכז הענן הישראלי של נביוס קיבל הסמכת אבטחה ברמת SOC2 Type II, הנחשבת לגבוהה ביותר בשוק מרכזי הנתונים (Data Centers) ותשתיות ענן. בהסמכה הזאת לא נבדקות רק סוג מערכות ההגנה שהותקנו, אלא גם האם הן באמת עובדות ביעילות לאורך זמן. המערכת גם עומדת בדרישות HIPAA, הנחשבות למחמירות ביותר בעולם בנושא ההגנה על מידע מתחום הבריאות והרפואה.
המאיצים משלבים כוח חישוב עם נפחי זיכרון רחבים ורוחב פס המאפשרים עבודה עם מודלי שפה גדולים ומודלים מורכבים אחרים בלא צורך בפיצול או התאמות מגבילות. מתוך כל משאבי מרכז הענן החדש, יוקצו בכל חודש 1,000 מאיצי HGX B200 לטובת פרוייקטים של התעשייה והאקדמיה במימון חלקי של רשות החדשנות. כ-70% מההיצע מיועד לחברות הייטק בשלבי אימון של מודלי בינה מלאכותית, וכ-30% יוקצו לקבוצות מחקר באקדמיה בשלבי מחקר בסיסי.
שוברי הנחה לחברות וגופים ישראלים
חברות וגופים ישראלים יכולים להגיש בקשה לתשתיות עיבוד בהיקף שימוש של לפחות 16 מאיצי B200, או לחלופין 72Petaflop/sec. גופים מהאקדמיה יכולים להגיש בקשה ל־8 מאיצים לכל בקשה. הבקשות שיאושרו יקבלו שוברים לשירותי עיבוד בעלות מופחתת של 30% ממחיר השוק. השירות שיקבלו כולל זמינות GPU ייעודית, הסכמי שירות ותמיכה טכנית. למידע נוסף על הליך קבלת השוברים, הקליקו: מתן שוברים לשימוש במעבדות מו״פ.
מנכ״ל רשות החדשנות, דרור בין, אמר שהמהלך נועד לאפשר פיתוח ואימון של מודלים גדולים בישראל, להאיץ חדשנות תעשייתית ומחקרית, ולחזק את יכולתה של ישראל להתחרות במירוץ הטכנולוגי העולמי. היוזמה מגיעה על רקע ביקוש גובר למשאבי מחשוב לאימון מודלים גדולים, המתורגם כיום לעלויות גבוהות ולזמני המתנה ארוכים בשירותי ענן מסחריים. שירות מחשב העל מהווה תשתית אסטרטגית שנועדה להסיר חסמים אלה ולאפשר לגופים מקומיים לבצע מו״פ מתקדם בקצב גבוה ובוודאות תפעולית.
אומנם הכרזת פלטפורמת Rubin של אנבידיה לתשתיות בינה מלאכותית משכה את רוב תשומת הלב בכנס CES 2026 שהתקיים בשבוע שעבר בלאס וגאס, אולם היא ביצעה בכנס מהלך נוסף, מעט בצנעה, שיש לו משמעות אסטרטגית עמוקה על שוק הרכב: השקת המודל הפתוח לנהיגה אוטונומית Alpamayo, שנועד לשמש כשכבת תכנון והחלטה במערכות נהיגה עתידיות. ההשקה צפויה להשפיע גם על האופן שבו יפותחו מערכות נהיגה אוטונומית, וגם על מערך היחסים שבין ספקי הטכנולוגיה בשוק הרכב, ובמיוחד על חברות האוטוטק הישראליות.
רוב החברות הישראליות, דוגמת אינוויז וארבה המפתחות חיישני LiDAR ומכ"ם, או קוגנטה ופורטיליקס הפועלות בתחומי הסימולציה והאימות של מערכות נהיגה, אינן מספקות מערכת שלמה אלא רכיבי ליבה בתוך שרשרת הערך. עבורן זה עשוי להתברר כמהלך תומך. מנגד, קיומו של מודל תכנון פתוח וגמיש המאפשר ליצרניות רכב להרכיב מערך תוכה-חומרה (Stack) המותאם לפלטפורמת מחשוב אחת מציב אתגר אסטרטגי בפני מובילאיי. החברה מירושלים בנתה את מעמדה על פתרון מלא מקצה לקצה, ועל נטילת אחריות מערכתית מלאה.
NVIDIA DRIVE: אקוסיסטם AI-First לשוק הרכב
מודל Alpamayo מצטרף לשורת הפתרונות שאנבידיה מאגדת תחת פלטפורמת NVIDIA DRIVE, שהיא מערך רחב היקף לפיתוח מערכות רכב חכמות. הפלטפורמה כוללת משפחות מעבדים ייעודיים כמו Orin ו-Thor, מערכת הפעלה לרכב, כלים לעיבוד ואיחוד נתוני חיישנים, סימולציות מבוססות Omniverse ו-DRIVE Sim ותשתיות אימון וניהול מודלים בענן. במילים אחרות, מדובר בסטאק מלא המיועד ללוות את יצרניות הרכב משלב הפיתוח והבדיקות ועד להרצה בזמן אמת ברכב עצמו.
המודל משתלב בתפיסת AI-first vehicle stack שהחברה מקדמת: מעבר ממערכות הנשענות בעיקר על חוקים ידניים ואלגוריתמים ייעודיים, למערכות שבהן מודלי בינה מלאכותית גדולים הופכים לרכיב מרכזי. גם בשכבות שבעבר נחשבו כמתאימות לאלגוריתמים “קלאסיים”, כמו למשל שכבת קבלת ההחלטות. בהקשר הזה Alpamayo הוא רכיב אסטרטגי: לראשונה מציעה NVIDIA מודל foundation תוצרת בית לשכבת התכנון וההחלטה, המאחד את NVIDIA DRIVE סביב רעיון הסטאק מבוסס AI מקצה לקצה – מהאימון בענן ועד הביצוע במחשב הרכב.
המוח הטקטי של הרכב
Alpamayo הוא מודל מולטי-מודלי גדול מסוג Vision-Language-Action (VLA), המקבל מידע ממספר מצלמות וידאו, חיישני LiDAR, חיישני מכ"ם ומערכות הרכב עצמן, ומתרגם את המידע לייצוג פנימי המאפשר לבצע הסקות ותכנון פעולה. על בסיס זה הוא מפיק מסלול תנועה עתידי לטווח של כמה שניות קדימה. המודל אינו מפעיל ישירות את מערכות הרכב כמו בלמים או הגה, אבל קובע מהי ההתנהגות הטקטית של הרכב.
בניגוד למודלי שפה כלליים, Alpamayo פועל במרחב פיזי ומשלב תפיסה עם reasoning מרחבי וקונטקסטואלי. הקלט שלו כולל רצפי וידאו, נתוני תנועה, ולעיתים גם מפות ויעדי ניווט. המודל מבצע הבנת סצנה, הסקת סיכונים ותכנון מסלול כחלק משרשרת החלטה אחת. הפלט המרכזי הוא trajectory: מסלול רציף שמועבר לשכבת הבקרה הקלאסית של הרכב, שאחראית על ההפעלה הפיזית והבטיחותית.
אימון מודל כזה מתבצע באמצעות שילוב של נתונים סינתטיים עם נתונים מהעולם האמיתי. הנתונים הסינתטיים מיוצרים באמצעות פלטפורמות הסימולציה של אנבידיה: Omniverse ו-DRIVE Sim. המודל משוחרר במתכונת קוד פתוח, כולל המשקלים וקוד האימון. הדבר מאפשר ליצרניות רכב ולספקי Tier-1 לאמן אותו על המידע שלהן, להתאים אותו לארכיטקטורת המערכת שלהם, ולשלב אותו במערכת הסטאקים שלה. לא כמוצר סגור, אלא כבסיס לפיתוח פנימי. אנבידיה גם דיווחה מספר שותפויות עם חברות מובילות, בהן: Lucid Motors,Jaguar Land Rover, Uber ושת"פ עם עם גופים Berkeley DeepDrive בפיתוח טכנולוגיות נהיגה אוטונומית מתקדמות.
מובילאיי: אתגר לפתרון המלא
סטאק נהיגה אוטונומית בנוי מכמה שכבות: חיישנים, תפיסה (perception), תכנון והחלטה (planning), ובקרה (control). Alpamayo יושב בשכבת התכנון. הוא אינו מחליף את התפיסה, ואינו מחליף את שכבות הבטיחות והשליטה, אך הוא מחליף (או לפחות מאתגר) את שכבת קבלת ההחלטות האלגוריתמית הקלאסית. המשמעות היא שהמערכת יכולה להיות מודולרית: תפיסה מספק אחד, תכנון ממודל של אנבידיה, בקרה מ-Tier-1 אחר. זהו שינוי תפיסתי לעומת פתרונות “קופסה שחורה” מקצה לקצה.
כאן מגיעה נקודת המתח מול מובילאיי. במשך שנים מובילאיי בנתה הצעת ערך של סטאק כמעט מלא: חיישנים, תפיסה, מיפוי, תכנון, ושבבי EyeQ ייעודיים המריצים את כל הפתרון ביעילות אנרגטית גבוהה. זה מודל שמתאים מאוד ל-ADAS ול-L2+, וגם לגרסאות מתקדמות יותר של אוטונומיה. אך מודלי ייסוד לשכבת התכנון משנים את נקודת האיזון. הם דורשים חישוב גמיש ועוצמתי יותר מזה ששבבי ADAS ייעודיים מספקים, ודוחפים את המערכת לכיוון מחשוב מבוסס GPU.
אף שבתרחישים מסוימים ניתן לשלב רכיבי תפיסה של מובילאיי בתוך סטאקים רחבים יותר, מרבית פתרונות האוטונומיה המתקדמים של החברה מוצעים כיחידה מערכתית שלמה, ולכן בפועל הגמישות להחלפת שכבות בודדות מוגבלת. מעבר לכך, עצם קיומו של מודל תכנון פתוח בשכבה הזו, מחליש את הערך של מודולי תוכנה קנייניים. במקום לפתח או לרכוש אלגוריתמי planning ייעודיים, ניתן להתאים מודל foundation קיים לדאטה ולצרכים הספציפיים של היצרן.
אין מדובר באיום מיידי על עסקי הליבה של מובילאיי, אך בטווח הארוך התמונה משתנה: ככל שהשוק ינוע לעבר L3 ול-L4, ושכבת ההחלטה תהפוך עתירת AI, המודל יהיה אתגר אסטרטגי אמיתי לרעיון הפתרון הסגור מקצה לקצה. ראוי לציין שיש למובילאיי נותר יתרון מבני משמעותי: היא מספקת פתרון מקצה לקצה ולוקחת אחריות מערכתית מלאה על תפקוד ובטיחות המערכת. עבור יצרניות רכב רבות, במיוחד כאלה שאינן מחזיקות יכולות תוכנה ו-AI עמוקות, זהו יתרון קריטי. הן מעדיפות ספק אחד הנושא באחריות על המערכת כולה, אשר פותר אותן מהצורך להרכיב ולתחזק “פאזל” של רכיבים מספקים שונים, עם אחריות מפוצלת וסיכונים רגולטוריים גבוהים.
החושים של אינוויז וארבה מקבלים חיזוק
בניגוד למובילאיי, עבור חברות ישראליות המספקות חיישנים כמו אינוויז (Innoviz) וארבה (Arbe), המהלך הזה עשוי להיות מבורך. מודלי תכנון מתקדמים נהנים מ-input עשיר, אמין ורב-חושי. LiDAR מספק מידע תלת-ממדי מדויק על מרחקים וגאומטריה, בעוד שהמכ"ם מצטיין בזיהוי עצמים בתנאי תאורה קשים ומזג אוויר מאתגר. המידע המגיע מהחיישנים האלה הוא קריטי עבור שכבות תכנון ומודלי קבלת החלטות המתכננים מסלולי נסיעה במרחב פיזי משתנה. לכן שתיהן ממצבות את עצמן כחלק מהאקוסיסטם של אנבידיה, ולא כאלטרנטיבה לו. הן אף הדגימו בפועל אינטגרציה של מערכות החישה והתפיסה שלהן עם פלטפורמות המחשוב DRIVE AGX Orin. הן מבינות שבסטאק שבו שכבת ההחלטה נעשית יותר מתוחכמת ועתירת חישוב, הערך של חיישנים איכותיים גדל. המודל יכול להיות חכם ככל שיהיה, אך אם הקלט מוגבל, ההחלטות יהיו גרועות.
קוגנטה ופורטליקס: מי יבדוק את בטיחות ה-AI?
כאן נכנסות לתמונה החברות הישראליות קוגנטה (Cognata) ופורטליקס (Foretellix), אשר מספקות למערכת את הסימולציה, האימות וההסמכה. קוגנטה מתמקדת ביצירת עולמות מדומים ובבניית תרחישי נהיגה מורכבים לאימון ולבדיקות, ופורטליקס מתמקדת בכלי verification & validation שמודדים כיסוי תרחישים, מזהים פערים בהתנהגות המערכת, ומספקים מדדים כמותיים לרגולציה ולמהנדסי בטיחות.
ככל שגדל משקלם של מודלי AI בסטאק הנהיגה, גובר הצורך בהוכחת אמינות ובטיחות מבוססת תרחישים, ולא רק בקילומטרים מצטברים על הכביש. לכן גם קוגנטה וגם פורטליקס פועלות בתוך האקוסיסטם של אנבידיה: קוגנטה משתלבת בסביבות הסימולציה וה-Hardware in the Loop (בדיקות עם חיבור ישיר לחומרת הרכב האמיתית) של DRIVE לצורך אימון ובדיקות בקנה מידה גדול, ופורטליקס מחברת את כלי האימות והוולידציה שלה לפלטפורמות Omniverse ו-DRIVE לצורך בדיקות בטיחות למערכות נהיגה מבוססות AI.
קוד פתוח, אבל פלטפורמה סגורה-למחצה
למרות שהמודל משוחרר במתכונת קוד פתוח, הוא מותאם לפלטפורמות החומרה של אנבידיה: האופטימיזציה ל-CUDA, TensorRT ודיוקי חישוב נמוכים מאפשרת הרצה בזמן אמת על מחשבי DRIVE, שהם הרבה יותר דומים ל-GPU מאשר לשבבי ADAS ייעודיים. בכך Alpamayo משתלב באסטרטגיית הקוד הפתוח הרחבה יותר של אנבידיה, שבמסגרתה היא משחררת מודלים פתוחים לרובוטיקה, אקלים, רפואה ורכב – לאחר שעברו אופטימיזציה עמוקה לפלטפורמות המחשוב שלה. הגישה הזו מאפשרת לאקוסיסטם רחב להיבנות סביב המודלים, ומעניקה יתרון ביצועים ברור למי שבוחר בפלטפורמות של אנבידיה.
איום למודל אחד, הזדמנות לאחרים
מודל הנהיגה של אנבידיה אינו מבשר מהפכה מיידית בכבישים, אך הוא כן מסמן שינוי עמוק באופן שבו תעשיית הרכב חושבת על פיתוח מערכות אוטונומיות: פחות חוקים ידניים, יותר מודלי AI כלליים, יותר חישוב על הרכב, ויותר סימולציה ואימות. עבור חלק גדול מהאוטוטק הישראלי, זהו כיוון שתואם היטב את המוצרים והאסטרטגיה שלהן, ואף עשוי להאיץ אימוץ ושיתופי פעולה בתוך אקוסיסטם ה-DRIVE. עבור מובילאיי, לעומת זאת, זהו איתות לכך שקיימת דרך נוספת לבנות “מוח נהיגה”, שאינה נשענת בהכרח על סטאק סגור מקצה לקצה.
בתמונה למעלה: הפתרון המשולב InnovizSMARTer בזמן אמת. קרדיט: אינוויז
במסגרת תערוכת CES בלאס וגאס חושפת חברת אינוויז (Innoviz) את InnovizSMARTer, שהוא פתרון LiDAR חדש לערים חכמות ותשתיות, המשלב את החיישן InnovizSMART של החברה עם פלטפורמת העיבוד Jetson Orin Nano, כעדי לקבל יכולות עיבוד קצה מלאות. הפעם לא מדובר בחיישן בלבד, אלא ביחידת קצה אינטגרטיבית הכוללת חישה, מחשוב, קישוריות וניהול במוצר אחד שמיועד לפריסה ישירה בשטח.
בליבת הפתרון עומד עיבוד מקומי של נתוני ה-LiDAR, המאפשר לנתח את הסביבה בזמן אמת ולהפיק אירועים ותובנות תפעוליות מבלי לשדר זרמי נתונים גולמיים כבדים לענן או לשרתים מרכזיים. השילוב עם Jetson Orin Nano מאפשר להריץ אלגוריתמי תפיסה מבוססי AI בקצה הרשת, תוך עמידה בזמני תגובה קבועים וצמצום משמעותי של נפחי התקשורת. לפי אינוויז, המערכת מפחיתה פי 10 את דרישות רוחב הפס ומאפשרת שימוש בקישוריות אלחוטית כמו סלולר ו-Wi-Fi גם באתרים ללא תשתית סיבים.
אסטרטגיית שיווק חדשה
השילוב של חיישן ומחשב במארז מאוחד משקף מעבר של החברה משיווק מרכיב חומרה לאספקת פתרון מלא (Plug-and-Play). בשווקים כמו ערים חכמות, תחבורה עירונית ואבטחה היקפית, הלקוחות אינם מחפשים פרויקט אינטגרציה מורכב, אלא מערכת שניתן להתקין, לחבר לרשת ולהפעיל. ההתאמה לפלטפורמת אנבידיה אינה טריוויאלית ונחשבת לאתגר הנדסי משמעותי. חיישן LiDAR מייצר זרמי נתונים תלת־ממדיים רציפים, והפעלה שלהם על פלטפורמות GPU דורשת מיפוי מדויק של אלגוריתמים לעיבוד מקבילי, ניהול זיכרון וארכיטקטורה דטרמיניסטית.
אינטגרטורים ולקוחות תשתית מחפשים פתרונות המפחיתים סיכונים ומפשטים את תהליכי ההטמעה. פתרון המותאם רשמית לאקוסיסטם של NVIDIA מבטיח את היתרונות האלה. ההכרזה ב-CES משתלבת ברצף מהלכים שביצעה Innoviz בשנים האחרונות מחוץ לשוק הרכב האוטונומי. לאחר שהציגה את InnovizSMART כחיישן ייעודי לאבטחה היקפית ולתחבורה חכמה, אינוויז מרכזת כעת את הידע שנצבר למוצר אינטגרטיבי אחד.
שיתוף פעולה עם Vueron הקוריאנית
מנכ"ל אינוויז עומר כילף, וסמנכ"ל הפיתוח העסקי של Vueron, נוח יאנג
הכרזה נוספת של אינוויז ב-CES עוסקת בשיתוף פעולה עם חברת Vueron הקוריאנית, המתמחה בפלטפורמות תוכנה לפיתוח מערכות תפיסה מבוססות בינה מלאכותית לרכב ולתשתיות חכמות. במסגרת ההסכם, נתוני LiDAR מחיישני אינוויז, בהם InnovizTwo ליישומי רכב ו-InnovizSMART ליישומי תשתית, ישולבו בפלטפורמת הפיתוח של Vueron לצורך אוטומציה של תהליכי סימון נתונים, אימון מודלים ובדיקות של אלגוריתמי תפיסה.
המהלך נועד לקצר את זמני הפיתוח של מערכות AI, להפחית תלות בסימון ידני ולהאיץ מעבר מפיילוטים לפתרונות מבצעיים. עבור אינוויז, שיתוף הפעולה משתלב במהלך הרחב של הרחבת פעילותה מעבר לחיישנים עצמם אל סביבת פיתוח מלאה ללקוחות, ומחזק את הקישור בין טכנולוגיית ה-LiDAR שלה לבין תהליכי פיתוח תוכנה ליישומי תחבורה ותשתיות חכמות.
חברת אנבידיה (NVIDIA) חשפה בתערוכת CES 2026 בלאס וגאס את פלטפורמת Rubin, שאותה היא מגדירה "הדור הבא של תשתיות בינה מלאכותית". עצם קיומה של Rubin והעובדה שתגיע לשוק במחצית השנייה של 2026 כבר היו ידועות. אלא שבהכרזה הנוכחית נחשף לראשונה הרעיון העומד מאחוריה: לא עוד דור של מעבדים גרפיים, אלא שינוי תפיסתי עמוק באופן שבו נבנות ומופעלות מערכות AI בקנה מידה גדול. במקום רכיב GPU גדול העומד במרכז ומקבל תמיכה ממערכות אחרות – אנבידיה הציגה ארכיטקטורה שלמה הפועלת כיחידה אחת באמצעות שילוב של חישוב, זיכרון, רשת ואבטחה.
המסר החוזר הוא שרובין איננה שבב אלא מערכת מחשוב שלמה בקנה מידה של ארון שרתים. היא מיועדת לסביבה שבה הבינה מלאכותית אינה צ’אטבוט בודד או משימה חד־פעמי, אלא סביבה מרובת-סוכנים הפועלים לאורך זמן, שומרים הקשר, משתפים זיכרון ומסיקים מסקנות בסביבה משתנה. במובן הזה, Rubin מסמנת מעבר של אנבידיה משיווק של עוצמת חישוב לשיווק של תשתית קוגניטיבית.
Extreme Codesign כעיקרון
אנבידיה משתמשת כבר שנים במונח full stack, אך ברוב המקרים המשמעות הייתה ערימה של רכיבים שנבנו סביב ה־GPU. בהקשר של Rubin היא הגדירה מחדש המונח Codesign. מסורתית, המונח הזה מתייחס לחתימה דיגיטלית על קוד תוכנה. אנבידיה מתארת את הגישה שלה כ-Extreme Codesign ומתכוונת לדבר שונה לחלוטין: תכנון משותף מראש של כל חלקי המערכת במטרה להביא אותם לפעול כיחידה אחת המותאמת לעומסי עבודה גדולים מאוד.
אחת המשמעויות של Extreme Codesign היא שה־GPU הפסיק להיות נקודת המוצא של הארכיטקטורה. אומנם הוא רכיב מרכזי חשוב, אולם איבד את מעמדו כלב המערכת. התכנון של Rubin מבוסס על ההנחה שצוואר הבקבוק (bottleneck) של מערכות ה-AI אינו בכוח החישוב הגולמי, אלא ביעילות המערכתית הכוללת: ניהול הקשר, זיכרון מתמשך ותזמון בין תהליכים וסוכנים. בעיות כאלה אינן ניתנות לפתרון באמצעות מעבד GPU חזק יותר, אלא באמצעות חלוקה מחדש של תפקידים בין רכיבי המערכת. מדובר בנקודת מפנה עבור אנבידיה. היא נוטשת את תפיסת GPU-first שאפיינה אותה מאז ימי CUDA, ומאמצת תפיסה מערכתית שבה החישוב הוא רק מרכיב אחד של המערכת.
תפקידו החדש של ה־CPU
מערכת Rubin כוללת את המעבד Vera CPU של אנבידיה. בניגוד ל-CPU מסורתי במרכזי AI שתפקידו בעיקר לארח ולתזמן את עבודת ה-GPU, כאן מדובר במעבד שתוכנן מראש כחלק אינטגרלי של מערך ההסקה והחשיבה אשר תפקידו המרכזי הוא לתאם בין סוכנים, לנהל זרימות עבודה מרובות שלבים ולהפעיל לוגיקה שאינה מתאימה לביצוע ב-GPU. ייתכן שמדובר שינוי עמוק בתפקידי ה־CPU בעידן ה-AI. הוא חוזר להיות רכיב חישובי משמעותי הפועל בסימביוזה עם המאיץ הגרפי ולא מעליו או מתחתיו. הדבר מלמד שאנבידיה שואפת לשלוט גם בשכבת התזמור והשליטה, ולא רק בחישוב עצמו.
הבחירה בארכיטקטורת Arm עבור המעבד Vera משקפת את הצורך של אנבידיה לשלוט במבנה ה־CPU עצמו. בניגוד למעבדים כלליים שמיועדים להריץ מגוון רחב של עומסי עבודה, Arm מאפשרת לאנבידיה לעצב מעבד המותאם בדיוק למשימה, תוך ויתור על שכבות לוגיקה שאינן רלוונטיות להסקה ולתזמור סוכנים. כלומר מודל מרכזי הנתונים הקלאסי, המבוסס על CPU בארכיטקטורת x86 כנקודת מוצא, אינו עוד הבחירה המובנת מאליה במערכות שנבנות מראש כ־AI-first.
זיכרון, אחסון והולדת שכבת ההקשר
ככל הנראההחידוש הארכיטקטוני המשמעותי ביותר בהכרזה הנוכחית נוגע לאופן שבו מנוהל הזיכרון של תהליכי inference. אנבידיה מציגה גישה חדשה לניהול זיכרון ההקשר של מודלים גדולים, ובפרט של KV Cache הנוצר במהלך הסקה מרובת שלבים. בארכיטקטורה הקלאסית, שתוכננה סביב עומסי עבודה קצרים ומבודדים, זיכרון כזה נדרש להישאר ב-HBM של ה־GPU כדי לשמור על ביצועים, מה שהפך אותו למשאב יקר ומוגבל והקשה על עבודה מתמשכת ורב־סוכנית.
ב־Rubin הועבר חלק ניכר מזיכרון ההקשר אל מחוץ ל-GPU, לשכבה ייעודית המתנהגת כמו זיכרון ולא כמו אחסון מסורתי. כאן משתנה גם תפקידו של BlueField-4, שהוא מעבד DPU שמקורו בטכנולוגיית הרשת של מלאנוקס. הוא כרכיב להסטת עומסים (offload) והופך לחלק פעיל בניהול זיכרון ההקשר ובתיאום הגישה אליו. השינוי הזה נובע מהפער בין ארכיטקטורות שנבנו עבור אימון או inference חד-פעמי, לבין הצרכים של מערכות סוכנים שפועלות לאורך זמן, שומרות מצב ומשתפות הקשר בין רכיבים. ניהול הזיכרון הפך לחלק מנתיב הביצועים של inference, ולא לשכבת I/O חיצונית.
קישוריות כרכיב חישובי ומעבר לעולם הסוכנים
גם תחום הקישוריות משנה את ייעודו ב-Rubin. ה-NVLink ממשיך לשמש כחיבור פנימי מהיר בין GPUs, אך שכבת ה־Ethernet, בדמות Spectrum-6 ו-Spectrum-X, מקבלת תפקיד שונה מזה שהייתה לה במרכזי נתונים מסורתיים. במקום לשמש רק להעברת נתונים בין שרתים, הרשת הופכת לחלק מהאופן שבו המערכת כולה מנהלת חישוב וזיכרון. הקישוריות מאפשרת לרכיבים השונים (GPUs, מעבדים ויחידות DPU) לגשת לזיכרון משותף, לשתף מצב בין תהליכים, ולפעול כאילו היו חלק ממערכת אחת רציפה, גם כשהם מותקנים בשרתים או מסדים נפרדים. טכנולוגיות כמו RDMA (גישה ישירה לזיכרון דרך הרשת) מאפשרות גישה ישירה לזיכרון דרך הרשת, ללא מעורבות ה־CPU. כלומר הרשת אינה רק מעבירה נתונים אלא משתתפת בפועל בזרימת ההסקה.
למעשה המערכת מעבירה את הדגש מאימון כמרכז הכובד, להסקה מתמשכת ומרובת סוכנים. Rubin מיועדת לעולם שבו רוב עלות ה־AI והערך העסקי שלו נמצאים בשלב ההפעלה ולא בשלב האימון. בעולם כזה, מה שקובע הוא לא רק כמה מהר ניתן לחשב, אלא כמה טוב ניתן לזכור, לשתף ולהגיב. זהו ניסיון מעניין של אנבידיה להגדיר מחדש את מבנה תשתיות ה-AI. לא עוד מרוץ אחר TFLOPS, אלא תחרות על מי שולט בארכיטקטורה כולה. אם המהלך יצליח, אנבידיה לא תהיה רק ספקית של מאיצים, אלא ספקית של תשתית מחשבתית מלאה.
בסרט המדע הבדיוני הקלאסי משנות החמישים The Brain Eaters, המפלצות לא הורגות את קורבנותיהן. הן נצמדות לראשן, שואבות את המוח ומשאירות אחריהן גוף חי, מתפקד למראית עין – אולם חלול מתוכן ומזהות. זו אנלוגיה מרחיקת לכת ואפילו מקברית, אבל היא עשויה להמחיש היטב את מבנה העסקה יוצא הדופן שנחתמה בין אנבידיה ו-Groq. בסוף השבוע הודיעו שתי החברות על עסקה בעלת מבנה חריג: הסכם רישוי טכנולוגי לא בלעדי שבמסגרתו אנבידיה מקבלת גישה לטכנולוגיית ההסקות (אינפרנס) שפיתחה Groq, ובמקביל מקבלת לשורותיה את מייסד החברה ג’ונתן רוס, את הנשיא סאני מדרה ועימם חברי צוות מרכזיים נוספים. חברת Groq עצמה תמשיך לפעול כחברה עצמאית, עם הנהלה חדשה ושירות ענן פעיל.
איימה על אנבידיה בשלב הרצת המודלים
היקף העסקה לא פורסם, אך ההערכות בשוק הן מדובר בכ-15-20 מיליארד דולר. ההערכה הזו כוללת תשלום עבור רישוי טכנולוגיית האינפרנס של Groq, חבילות תגמול וקליטה ארוכות טווח למייסד ולצוות הבכיר שעברו לאנבידיה, וכן פרמיה על קניין רוחני ופיתוח עתידי שנחסך מהחברה. לשם השוואה, רק בספטמבר האחרון ביצעה Groq גיוס הון לפי שווי של כ־6-7 מיליארד דולר. הפער הזה ממחיש עד כמה העסקה הנוכחית חורגת ממעסקת רישוי גרידא, ודומה יותר לעסקת רכישה בקנה מידה מלא.
כבר במבט ראשון ברור שלא מדובר בעסקה רגילה. אנבידיה מקבלת את מה שחשוב לה באמת – הידע, הקניין הרוחני והאנשים שמאחוריו – מבלי לרכוש את החברה עצמה, בלי שינוי שליטה פורמלי ובלי לעבור במסלול הבדיקות והאישורים שמלווה מיזוגים ורכישות בקנה מידה כזה. זו אינה עסקה של “קניית סטארט־אפ”, אלא עסקה של העברת יכולת, Capability Transfer. מונח שעד לאחרונה כמעט ולא היה חלק מהשיח הציבורי, וכעת הופך לאסטרטגיה מוצהרת של ענקיות הטכנולוגיה.
ההיבט הטכנולוגי מספק הקשר חשוב. Groq פיתחה מאיצי הסקות ייעודיים שתוכננו מלכתחילה לביצוע מהיר ודטרמיניסטי של מודלים בזמן אמת, עם דגש על שיהוי נמוך ויעילות תפעולית – תחום שבו ארכיטקטורות GPU כלליות מתקשות יותר. ככל שהתעשייה נעה מאימון מודלים כמאורע חד־פעמי אל אינפרנס כפעילות רציפה, יומיומית ורווחית, היכולת לספק תגובה מיידית הופכת לנכס אסטרטגי. הידע של Groq מסייע לאנבידיה לחזק את שכבת האינפרנס בפלטפורמה שלה, אך לא פחות חשוב מכך – להוציא מהשוק מתחרה פוטנציאלית שהציעה חלופה ייעודית ל־GPU דווקא בנקודת החיכוך הרגישה ביותר של שרשרת הערך.
במקום להתמודד מולה כחברה עצמאית שמאיימת לכרסם בנישה קריטית, אנבידיה בוחרת לספח את הידע והאנשים, ולהפוך איום חיצוני ליכולת פנימית. הבחירה במבנה של רישוי ו"רכישת הון אנושי" (Acqui-hire) אינה מקרית. רכישה מלאה הייתה מכניסה את אנבידיה לשדה מוקשים רגולטורי, במיוחד על רקע מעמדה הדומיננטי בשוק השבבים ל-AI. הסכם רישוי, לעומת זאת, נראה על הנייר כעסקה מסחרית, ומעבר עובדים הוא מהלך לגיטימי בפני עצמו. כך מתקבלת תוצאה שדומה מאוד לרכישה, אך בלי לשלם את המחיר הפורמלי שלה. דרך אלגנטית לקצר לוחות זמנים, לצמצם סיכונים ולהשאיר את הרגולטור מחוץ לחדר.
שינוי מהותי בחוזה החברתי של עמק הסיליקון
אלא שהמשמעות האמיתית של המהלך חורגת הרבה מעבר לאנבידיה. העסקה הזו משנה את כללי המשחק עבור סטארט־אפים, עובדים ומשקיעים. במשך עשורים, האקזיט נתפס כאירוע ברור: שינוי שליטה שמפעיל מנגנונים חוזיים, מממש אופציות, ומחלק את התמורה בין מייסדים, משקיעים ועובדים. כאן, לעומת זאת, אין שינוי שליטה. החברה ממשיכה להתקיים, אך הנכס המרכזי שלה – ההון האנושי והכיוון הטכנולוגי – יוצאים ממנה.
עבור העובדים, זו נקודת שבר. רבים מצטרפים לחברות סטארט־אפ מתוך ידיעה שעבודה קשה מאוד ושכר נמוך יחסית מתקזזים עם אופציות ועם האפשרות שארוע האקזיט עשוי להגיע. בעסקאות מסוג Acqui-hire, האירוע מגיע – אבל לא בהכרח עבור כולם. חלק מהאנשים עוברים לחברה הרוכשת בפועל, לעיתים עם חבילות אישיות נדיבות, בעוד שהאחרים נותרים בחברה המוגדרת כעצמאית, אולם כזו שעתידה לא ברור וסיכויי המימוש שבה אינם גדולים. זהו שינוי עמוק בחוזה החברתי של עמק הסיליקון.
גם מבחינת המשקיעים התמונה מורכבת. מחד, הסכמי רישוי בהיקף גדול יכולים לייצר נזילות משמעותית בלי מכירה מלאה של החברה. מנגד, נשברת הסימטריה המוכרת של “כולנו באותו אקזיט”. התמורה הופכת לבסיס של משא ומתן ייעודי, לאירוע חד־משמעי. כל עסקה נראית אחרת, וכל חלוקת ערך הופכת לבסיס לדיון מחדש.
נורת אזהרה ומפת דרכים
אנבידיה ו-Groq לא המציאו את השיטה. בשנים האחרונות מתרבית המקרים שבהם ענקיות טכנולוגיה רוכשות אנשים ויכולות באמצעות רישוי והעסקה – ולא באמצעות רכישה מלאה. הסיבה פשוטה: בשוק שבו הידע עמוק, נדיר ומרוכז אצל קומץ מהנדסים ומובילים טכנולוגיים, אנשים שווים יותר מהחברה שמעסיקה אותם. הקניין הרוחני הקיים בראשם של אנשי המפתח חשוב יותר מהמוצר עצמו.
בסופו של דבר, העסקה בין אנבידיה ל-Groq מסמנת שינוי כיוון בתעשייה. לא רק מעבר טכנולוגי לאינפרנס, אלא מעבר מבני באופן שבו חברות גדולות קונות עתיד. פחות רכישות פומפוזיות, יותר חילוץ ממוקד של ידע ואנשים. פחות אקזיטים חגיגיים, יותר עסקאות אפורות, מורכבות, שמטשטשות את הקווים בין הצלחה לכישלון. עבור מי שבונה היום סטארט־אפ או שוקל להצטרף לאחד, זו נורת אזהרה וגם מפת דרכים: בעידן החדש, לא תמיד החברה נמכרת – לפעמים רק המוח שלה.
הפור נפל: חברת אנבידיה (NVIDIA) בחרה להקים את הקמפוס החדש שלה בקרית טבעון. עם השלמתו, הוא צפוי להתפרס על-פני שטח של כ-90 דונם, שמתוכו כ-160,000 מ"ר של שטחים בנויים ומשותפים. תכנון האתר מעוצב בהשראת המטה האייקוני של החברה בסנטה קלרה, קליפורניה. העבודות בשטח צפויות להתחיל במהלך 2027, והאיכלוס הראשוני מתוכנן לשנת 2031. מרכז הפיתוח בקרית טבעון צפוי להעסיק יותר מ-10,000 עובדות ועובדים. בכך תהיה אנבידיה מעסיקת ההייטק הגדולה בישראל.
מהחברה נמסר שהקמפוס יציע סביבת עבודה חדשנית ושירותים מתקדמים: פארקים, מרכז מבקרים, בתי קפה ומסעדות. לצד אלה, הוא יכלול גם מעבדות ומרחבים משותפים שיקדמו שיתופי פעולה וחדשנות בתוך אנבידיה, ויחד עם חברות סטארט-אפ ושותפים באקוסיסטם הטכנולוגי המקומי. ההשקעה בקמפוס החדש צפויה להסתכם בכמה מיליארדי שקלים לאורך מספר שנים. מייסד ומנכ"ל חברת אנבידיה, ג'נסן הואנג, אמר: "ישראל היא הבית של אנשי טכנולוגיה ומהנדסים מהמבריקים בעולם, והפכה לבית השני של NVIDIA. הקמפוס החדש שלנו יהיה המקום שבו הצוותים שלנו יוכלו לשתף פעולה, להמציא ולבנות את עתיד ה-AI. ההשקעה הזו משקפת את המחויבות העמוקה וארוכת הטווח שלנו למשפחות שלנו בישראל ולתרומתן הייחודית לעידן ה-AI".
סגן נשיא בכיר להנדסת תוכנה ומנהל מרכז הפיתוח של NVIDIA בישראל, עמית קריג, אמר: "הצמיחה של NVIDIA בישראל היא יוצאת דופן, ומונעת על-ידי הכישרון המדהים והמצוינות ההנדסית של האנשים שלנו. אנו מודים לג’נסן ולהנהלת אנבידיה על האמון והתמיכה בשלב הצמיחה הבא, וכן למשרד האוצר ולרשות מקרקעי ישראל על השותפות. אנחנו מצפים בקוצר רוח להביא את החזון הזה לכדי מציאות ולהמשיך לבנות את עתיד הבינה המלאכותית״. ראש המועצה המקומית קריית טבעון, עידו גרינבלום, אמר שמדובר בפרוייקט "משנה מציאות" עבור המועצה וכל אזור הצפון. "אנחנו בטוחים שהבחירה של אנבידיה באזור ובמיקום הזה תוכיח את עצמה כבחירה נכונה”.
אנבידיה הודיעה על רכישת SchedMD, החברה שמפתחת ומתחזקת את Slurm – מערכת ניהול העומסים (Workload Manager) הפופולרית ביותר בעולם ה-HPC וה-AI. סכום העסקה לא פורסם, אך המהלך מסמן צעד נוסף באסטרטגיה של אנבידיה להרחיב את אחיזתה לא רק בחומרת האצה, אלא גם בשכבות התוכנה הקריטיות שמנהלות בפועל את משאבי המחשוב היקרים ביותר בעולם הבינה המלאכותית.
SchedMD היא חברה אמריקאית שהוקמה בשנת 2010 על ידי מפתחי Slurm, אך שורשי הטכנולוגיה עמוקים יותר. Slurm פותח בתחילת שנות ה-2000 במעבדות Lawrence Livermore National Laboratory, במטרה ליצור חלופה פתוחה למערכות תזמון קנייניות לאשכולות מחשוב עתירי ביצועים. מאז הפך Slurm לסטנדרט דה-פקטו: כיום הוא מותקן בכמחצית מהמחשבים המובילים בעולם (TOP500), ומשמש אוניברסיטאות, מכוני מחקר, גופי ביטחון, חברות פארמה, פיננסים ויותר ויותר גם ארגונים שמפעילים תשתיות AI פנימיות.
בפשטות, Slurm הוא המנוע שמחליט מי מקבל משאבי מחשוב, מתי ואיך. הוא מנהל תורים, מקצה CPUs, זיכרון ו-GPUs, ומוודא שהעומסים רצים בצורה הוגנת ויעילה על פני אשכולות שיכולים לכלול אלפי שרתים. בעולם ה-AI, שבו אימון מודלים צורך כמויות עצומות של GPU, Slurm הפך לרכיב קריטי ב-workflow: בלי תזמון חכם, חלק ניכר מהמשאבים היקרים הללו פשוט מבוזבז.
המשתמשים הישירים ב-Slurm אינם מפתחי האפליקציות, אלא צוותי התשתיות – אלה שמפעילים את הדאטה-סנטרים והאשכולות. מפתחי AI “פוגשים” את Slurm רק דרך הגשת jobs, מבלי לדעת בהכרח איך מתקבלות החלטות ההקצאה מאחורי הקלעים. בענני ציבור, לעומת זאת, מנגנוני תזמון דומים פועלים לרוב באופן פנימי ושקוף ללקוחות.
חשוב להבחין בין Slurm לבין פתרונות כמו Run:AI, שנרכשה גם היא על ידי אנבידיה. בעוד Slurm הוא ה-scheduler הבסיסי של האשכול – שכבת תשתית נמוכה שמכירה משאבים – Run:AI פועלת כשכבת אופטימיזציה חכמה מעל Kubernetes, עם מודעות לצוותים, פרויקטים, ניסויים וערך עסקי. במילים אחרות: Slurm מחלק את "הברזל", Run:AI מחלק אותו בהקשר ארגוני. השילוב ביניהם יוצר רצף שלם – מהחומרה ועד ניהול עומסי AI ברמה העסקית.
כאן נכנס ההיבט האסטרטגי של הרכישה. למרות ש-Slurm הוא קוד פתוח, השליטה בגוף שמוביל את פיתוחו מעניקה לאנבידיה השפעה עמוקה על כיוון המוצר, קצב הפיתוח והאופטימיזציה לחומרה שלה. Slurm כבר היום מותאם היטב ל-GPUs של אנבידיה, אך כעת ניתן לצפות לאינטגרציה הדוקה אף יותר עם CUDA, NVLink, InfiniBand ויכולות כמו MIG (טכנולוגיה לפיצול GPU אחד לשימוש מקביל). התוצאה: ניצול גבוה יותר של GPUs – מה שמתורגם בסופו של דבר לעוד רכישות חומרה.
מעבר לכך, אנבידיה ממשיכה לבנות שליטה אנכית מלאה ב-stack של תשתיות AI: מעבדים, רשת, ספריות תוכנה, תזמון עומסים וניהול ארגוני. הרכישה של SchedMD אולי נראית צנועה לעומת עסקאות ענק אחרות, אך בפועל היא נוגעת בנקודת החיכוך הקריטית ביותר של עולם ה-AI – מי שולט בזמן החישוב. ובתחום שבו כל דקת GPU שווה כסף רב, זו שליטה אסטרטגית מהמעלה הראשונה.
חברת Creation-Space הישראלית מודיעה על פתיחת ההרשמה למחזור השלישי של תוכנית ההאצה EXPAND, הפועלת ממצפה רמון ומיועדת ליזמים וחברות המפתחות טכנולוגיות לשווקים ארציים עם פוטנציאל עתידי למשימות חלל. השנה מצטרפת לראשונה NVIDIA כשותפה טכנולוגית, ותעמיד למשתתפים גישה למומחים, קרדיטי פיתוח והדרכות במסגרת תוכנית NVIDIA Inception.
EXPAND מהווה שער לסטארטאפים המעוניינים לפתח טכנולוגיות בעלות ערך כפול – פתרונות שמשרתים צרכים בכדור הארץ אך מסוגלים בעתיד להשתלב בכלכלה החללית המתהווה. התוכנית, הנמשכת שלושה חודשים, כוללת ליווי טכנולוגי ועסקי, גישה למנטורים ולעולמות ניסוי ייחודיים במצפה רמון. המשתתפים אף עשויים לקבל השקעה של עד 300 אלף דולר מקרן CreationsVC, במודל מאצ'ינג מול מענקים נוספים של עד 350 אלף דולר.
במקביל, Creation-Space ממשיכה לקדם את הקמת קמפוס החלל הלאומי במצפה רמון – מערך תשתיות שיכלול יכולות רובוטיקה, סימולציה, בדיקות שטח וסביבות מציאות מדומה, לצד פיתוח יוזמת Access Space שנועדה לאפשר לחברות לבצע ניסויי הדגמה בחלל בעלויות מופחתות ובתנאי שירות שקופים.
לדברי ד"ר רואי נאור, מנכ"ל ומייסד שותף של Creation-Space, "טכנולוגיות שנולדו על כדור הארץ יאפשרו שגשוג כלכלי בחלל, ולהפך. אנחנו בונים חברות סביב אתגרי חלל אמיתיים, אך כאלה שמייצרות ערך גם בשוק הארצי כבר היום". ערן רוזנברג, Partner Manager ב-NVIDIA Inception, מוסיף כי "יש עוד הרבה מקום לחדשנות בחיבור בין AI למשימות חלל, ואנחנו שמחים להרחיב את קהילת הסטארטאפים של אנבידיה בישראל במסגרת שיתוף הפעולה".
התוכנית נתמכת על ידי מגוון גופים בישראל ובחו"ל, ובהם קרן מיראז', JNF-USA, Synergy7, PwC, סוכנות החלל הישראלית וגופי פיתוח אזוריים. ההרשמה פתוחה עד 15 בדצמבר 2025.
חברת אנבידיה הציגה בכנס NeurIPS שנערך השבוע את DRIVE Alpamayo-R1, מודל נהיגה אוטונומית חדש שמוגדר כמודל ה־VLA (Vision-Language-Action – מודל המאחד ראייה, הבנת סצנה והסקה סיבתית עם יכולת תכנון וביצוע פעולה) הראשון בקנה-מידה תעשייתי הזמין בקוד פתוח. זהו צעד משמעותי עבור החברה, שביססה בשנים האחרונות את פעילותה בתחום הנהיגה האוטונומית על פלטפורמות מחשוב ייעודיות כמו DRIVE Orin ו–DRIVE Thor, אך טרם שחררה מודול נהיגה מרכזי הניתן לשימוש פתוח לכול. לצד המשמעות עבור אנבידיה עצמה, ההכרזה מהווה גם נקודת ציון עבור תעשיית הנהיגה האוטונומית, שבה מודלי החלטה פתוחים כמעט שאינם קיימים.
Alpamayo-R1 הוא מודל נהיגה אוטונומית מאוחד המבצע בו-זמנית ראייה ממוחשבת, הבנת סצנה והסקה סיבתית (reasoning), וכן תכנון מסלול ופעולה. בניגוד לארכיטקטורות הנהיגה המסורתיות שמפרידות בין תפיסה, חיזוי ותכנון, AR1 מבוסס על מבנה VLA שמחבר את שלושת הרבדים למערכת אחת רציפה. בליבת המודל נמצאת יכולת Reasoning – הסקה סיבתית – המאפשרת לו לפרק תרחישי נהיגה מורכבים לגורמים, לשקול “מסלולי מחשבה” אפשריים, ולגבש תכנון מסלול שמבוסס על הסברים פנימיים לתהליך קבלת ההחלטות.
לפי אנבידיה, המודל אומן על תמהיל של נתוני שטח, סימולציה ומערכי נתונים פתוחים, ובכלל זה Chain-of-Causation Dataset, שבו לכל פעולה יש הסבר כתוב ומובנה לגבי הסיבה שהובילה אליה. את שלב הפוסט-אימון ביצעו החוקרים באמצעות Reinforcement Learning, שהביא לשיפור ביכולות ה-reasoning ביחס לגרסה הטרום-מאומנת.
המודל מתוכנן להיות זמין לשימוש לא-מסחרי ב-GitHub וב-Hugging Face, לצד אלמנטים משלימים: AlpaSim – מסגרת בדיקה, ומערך נתונים פתוח בתחום הנהיגה האוטונומית.
מודל שקוף מול מודל סגור
מערכות נהיגה אוטונומית היום נחלקות לשני זרמים עיקריים: טסלה פועלת בגישת End-to-End Vision → Control, שבה מודל יחיד מקבל וידאו מהמצלמות ומחזיר פקודות היגוי ובלימה. המערכת של טסלה איננה פתוחה, אינה מספקת נימוקים מפורשים לפעולות, ולא מבוססת על הפרדה ברורה בין Reasoning לבין פעולה.
מובילאיי, לעומת זאת, ממשיכה לאמץ ארכיטקטורה “קלאסית” של תפיסה–חיזוי–תכנון המבוססת על מפות סמנטיות, אלגוריתמים דטרמיניסטיים וחוקי בטיחות. גם כאן המודלים עצמם סגורים, ומנגנוני ההחלטה אינם זמינים לניתוח חיצוני.
בנקודה הזו AR1 מבדל את עצמו: הוא מציג יכולת הסבר מפורש של המסלול שנבחר ושל ההיגיון שמאחוריו — דבר שעד כה כמעט לא נראה במערכות נהיגה, בטח לא ברמה תעשייתית.
העובדה שהמודל פתוח לשימוש מחקרי אינה רק אקט טכנולוגי; היא עשויה להשפיע על כיוון התעשייה. מודלי נהיגה מסחריים הם קופסאות שחורות, ולכן קשה לבדוק אותם רגולטורית, להשוות בין גישות או לאמת ביצועים בתרחישים נדירים. פתיחת מודל Reasoning מאפשרת, לראשונה, ביצוע ניסויים שקופים ושחזוריים, ובונה בסיס משותף לקהילה רחבה יותר — בדומה למה שעשו Llama ו-Mistral בתחום השפה.
הצגת AR1 מאותתת על שינוי תפיסתי: נהיגה אוטונומית מתקרבת לשדה שבו מודלי בינה כללית עומדים במרכז, במקום תלות מוחלטת במערכות ידניות ושלבי עיבוד מופרדים. בעוד שבפועל אין עדיין הוכחה שמודל מסוג זה יכול להחליף את כל המערכות הקיימות, זהו הצעד הברור ביותר עד היום לכך שהתחום מתקרב למה שאפשר לכנות “פיזיקה של התנהגות”— ניסיון להבין לא רק מה הרכב רואה, אלא למה הוא צריך לפעול בדרך מסוימת.
במקביל, המהלך משרת גם את אסטרטגיית החומרה של אנבידיה: ככל שמודלים הופכים צפופים, דורשי מחשוב ומבוססי סימולציה עתירת חישוב, כך גובר סימוכין לשימוש בפלטפורמותיה.
Alpamayo-R1 אינו מערכת נהיגה מלאה, אך הוא פותח לראשונה את לב המערכת — ההיגיון המחשבתי — בפני חוקרים, OEMs וסטארט-אפים. עבור תחום שנמצא שנים מאחורי דלתות סגורות, זו התפתחות בעלת פוטנציאל משמעותי.
בתמונה למעלה: פלטפורמת ההאצה Spectrum-X של חברת אנבידיה
מאת יוחאי שויגר
אנבידיה הוכיחה שוב בלילה שבין רביעי לחמישי למה היא במרכז מרוץ התשתיות ל-AI: החברה דיווחה על הכנסות רבעוניות של 57 מיליארד דולר, צמיחה שנתית של 62%, עם זינוק של 22% לעומת הרבעון הקודם. עיקר המנוע הוא חטיבת מרכזי הנתונים, שקבעה שיא חדש עם 51 מיליארד דולר – עלייה של 66% משנה לשנה. לשורה התחתונה מתווספת תחזית אגרסיבית לרבעון הרביעי: הכנסות של 65 מיליארד דולר, כלומר צמיחה רבעונית של כ-14% הודות להאצת אימוץ ארכיטקטורת Blackwell.
שיעור הרווח הגולמי עמד 73.6% (במונחי Non-GAAP), בין היתר בזכות תמהיל חזק של פתרונות דאטה סנטר ושיפור מחזורי הייצור והעלויות. במקביל, המלאי גדל ב-32% והתחייבויות האספקה קפצו ב-63% רבעון-לרבעון – איתות ברור לכך שהחברה “נטענת” לקראת המשך צמיחה.“העננים הציבוריים נמצאים בתפוסה מלאה, ומאגר ה-GPU שלנו – מדורות Ampere, Hopper ו-Blackwell – מנוצל במלואו”, אמרה סמנכ"לית הכספים קולט קרס. המשמעות: בענני-העל כמעט שלא נותר GPU פנוי. קרס הוסיפה כי לאנבידיה יש “נראות לחצי טריליון דולר בהכנסות מ-Blackwell ו-Rubin עד סוף 2026”.
מהפך התקשורת: האיתרנט הישראלי דוחף את אנבידיה
אחד מהכוכבים הגדולים של הדו"ח הוא דווקא תחום הקישוריות, אשר מבוסס על מוצרים המפותחים באנבידיה ישראל (מורשת מלאנוקס). חטיבת הרשתות רשמה הכנסות של 8.2 מיליארד דולר, צמיחה שנתית מרשימה של כ-162%. קרס ציינה כי “הקישוריות יותר מהוכפלה, עם האצה ב-NVLink וב-Spectrum X Ethernet, לצד צמיחה דו-ספרתית ב-InfiniBand”. מנכ"ל החברה ג'נסן הואנג הגדיר זאת בפשטות: “אנחנו מנצחים ברשתות למרכזי נתונים. רוב פריסות ה-AI הגדולות כוללות היום את המתגים שלנו, ויחסי החיבור של Ethernet ל-GPU כבר כמעט שווים לאלה של InfiniBand”.
מאחורי ההערה הזו מסתתר שינוי עמוק בשוק הנובע במידה רבה מהבשלת Spectrum-X – טכנולוגיית Ethernet ייעודית ל-AI שפותחה במטה הישראלי של אנבידיה, והפכה בתוך שנתיים לאלטרנטיבה אמיתית ל-InfiniBand. בניגוד ל-Ethernet המסורתי שלא עמד בעומסים הדרושים, שבבי Spectrum-X מעניקים ביצועים “בדרגת-AI” ומסוגל להתמודד עם תעבורה, סינכרון ו-collective ops בקנה מידה של ג'יגה-ואט. כלומק, "המהפך" שעליו דיבר הואנג לא התחולל בגלל שינויים בשוק אלא בזכות הבשלת טכנולוגיית ה-Ethernet של החברה.
Spectrum-X מקבל מעמד של תשתית גנרית
התוצאה: מספר מאיצי ה-GPU המקושרים באמצעות Spectrum-X בפרויקטי AI מהגדולים בעולם, מתקרב למספר המאיצים המחוברים באמצעות InfiniBand. זהו שינוי שהיה בלתי ייאמן עד לפני כשנתיים. עבור אנבידיה זהו הישג משמעותי, המאפשר לה לחדור עמוק לשוק ה-Ethernet שהיה עד לאחרונה מעוזן של Broadcom ו-Arista, ולמנוע מלקוחות גדולים “לברוח” לפתרונות מתחרים רק מפני שלא רצו לאמץ InfiniBand. בכך היא מרחיבה את שליטתה בשכבת הקישוריות ומביאה גם לקוחות Ethernet לתוך האקו־סיסטם שלה. לכן הכנסות חטיבת הקישוריות צומחות בקצב מהיר יותר מההכנסות הכוללות של החברה.
הואנג אמר שענקיות הענן כבר בונות את מפעלי ה-AI הגדולים בעולם על בסיס Spectrum-X: “מטא, מיקרוסופט, אורקל ו-xAI מקימות מפעלי גיגה־ואט המשתמשים במתגי Spectrum-X”. ובכך סימן שהאיתרנט של החברה הפך לחלק מהתשתית הגנרית של הדטה־סנטר. לדבריו, אנבידיה היא החברה היחידה כיום בעלת פלטפורמות scale-up, scale-out ו-scale-across, כלומר מכסה את כל שכבות הקישוריות במרכז הנתונים: NVLink בתוך השרת, InfiniBand בין שרתים, ו-Spectrum-X לפריסות הענק. מדובר בבידול עסקי משמעותי מכיוון שמתחרות כמו Broadcom ו-Arista פועלות כמעט רק ברובד המתגים. אנבידיה הפכה את הרשת כולה, מה־node ועד מפעל ה-AI, לחלק מהסטאק שלה.
סין בחוץ: מגבלות גיאו-פוליטיות מוחקות שוק של מיליארדים
מנגד, השוק בסין מתקרר במהירות. קרס: “הזמנות רכישה משמעותיות פשוט לא התממשו ברבעון בגלל סוגיות גיאו-פוליטיות והשוק התחרותי יותר ויותר בסין”, והבהירה כי לרבעון הבא “איננו מניחים שום הכנסות משוק מרכזי הנתונים בסין”. הואנג הוסיף כי החברה “מאוכזבת מהמצב הנוכחי, שמונע מאיתנו לספק לסין מוצרים תחרותיים יותר”, אך מדגיש כי אנבידיה “מחויבת להמשך הדיאלוג עם הממשלות בארה״ב ובסין” ושאמריקה חייבת להיות “הפלטפורמה המועדפת לכל עסק מסחרי – כולל אלה שבסין”.
Rubin מתקרבת: הסיליקון כבר בידי אנבידיה
מבט קדימה מופנה כבר לדור הבא: Rubin. הואנג עדכן לגבי Vera Rubin, פלטפורמת ה-AI הבאה אחרי Blackwell, שתיכנס לייצור סדרתי במהלך 2026. “קיבלנו כבר סיליקון מהשותפים בשרשרת האספקה, והצוותים שלנו ברחבי העולם מבצעים את שלב ההפעלה הראשונית (bring-up)”. לדבריו, Rubin היא “מערכת בקנה מידה של ארון שלם (Rack)/ היא הדור השלישי שלנו. היא מחדשת באופן מהותי את יכולת הייצור, אבל נשארת תואמת ל-Grace Blackwell, לשרשרת האספקה, לדאטה סנטרים ולשותפי הענן”. הוא הבטיח ש-Rubin תספק שיפור בביצועים "בסדרי גודל" בהשוואה לפלטפורמת Blackwell ותשמור על תאימות לאקו-סיסטם CUDA. "הלקוחות יוכלו להאיץ את האימון מבלי להחליף את כל התשתיות מאפס".
האם זו בועת AI? הואנג: “אנחנו רואים משהו אחר לגמרי”
מעל לכל אלה מרחפת השאלה האם מדובר בבועת AI. הואנג דחה זאת: “מנקודת המבט שלנו אנחנו רואים משהו אחר לגמרי”. לדבריו, העולם חווה שלושה “שינויי פלטפורמה” בו-זמנית – מעבר ממחשוב CPU למחשוב מואץ על GPU, החלפת למידת מכונה קלאסית ב-generative AI, ועליית ה-Agentic AI, מודלים שפועלים כסוכנים אוטונומיים. “כל אחד מהשינויים האלה דוחף השקעות תשתית לשנים קדימה, ואנבידיה היא הארכיטקטורה היחידה שמשרתת את שלושתם”, אמר.
הדו"ח הנוכחי מחזק את הנרטיב הזה: החברה הצהירה על צבר פרויקטים של כ-5 מיליון GPU למפעלי AI, טוענת לנראות לא רק לחצי טריליון דולר בהכנסות מ-Blackwell ו-Rubin עד 2026, אלא גם לצמיחה מעבר לכך, ומכינה את שרשרת האספקה – מהפרוסות הראשונות של Blackwell בארה״ב עם TSMC ועד שיתופי פעולה עם פוקסקון, וויסטרון ו-Amkor – לשנים של ביקוש עודף. כל עוד “העננים נמכרים עד האסימון (token) האחרון”, כפי שתיארה קרס, נראה שהשאלה היא לא האם אנבידיה תצליח לממש את החזון הזה – אלא עד כמה רחוק היא תוכל למתוח את עקומת הביקוש לפני שההיצע יתחיל להדביק אותו.
רוצים להישאר מעודכנים? הירשמו למטה לקבלת הניוזלטר השבועי שלנו
בתמונה למעלה: מנכ"ל אנבידיה ג'נסן הואנג (מימין) ביחד עם מנכ"ל אינטל ליפ-בו טאן. צילום: אינטל
חברת אינטל (Intel) תייצר מעבד Xeon ייעודי אשר יותאם לארכיטקטורה של חברת אנבידיה (NVIDIA) ויימכר רק לאנבידיה ולא ללקוחות צד שלישי. כך התברר השבוע במהלך כנס הטכנולוגיה של RBC Capital Markets שהתקיים ביום ג' האחרון בניו יורק, שבמהלכו גילה סגן נשיא אינטל לתכנון תאגידי, ג'ון פיצר (John Pitzer), פרטים ראשונים על הדרך שבה החברות ישתפו פעולה. כזכור, בחודש ספטמבר 2025 חשפו אינטל ואנבידיה הסכם שיתוף פעולה אסטרטגי, שבמסגרתו אנבידיה משקיעה 5 מיליארד דולר בחברת אינטל, אשר תייצר שבבי SoC המשלבים מעבדי CPU בארכיטקטורת x86 ביחד עם מעבדי GPU של אנבידיה.
פיצר סיפר שהחידושהמרכזינוגעלמודלהעבודהבשוק המחשביםהניידים החזקים, המהווה שוק יעד חדש עבור אנבידיה. בניגודלרכישהרגילהשלרכיבים, אינטלואנבידיהיפעלובמודלשל"הפקדה" (Bailment): אינטלתבצעאתהאינטגרציהוהאריזהשלהשבבהגרפישלNVIDIA בתוךהמעבדשלה, כאשר מבחינהכספיתהלקוחותישלמו ישירות לאנבידיה עבורהרכיבהגרפי. פיצר הסביר שהמודל הזהמאפשרלאינטללאלהעמיסעלעצמה חלק מעלויות הייצור, אשר פוגעות בריווחיות המהלך.
שוק חדש למאיצי GPU
הוא לא מסר לוחות זמנים, אבל סיפר שמנכ"ל אינטל, ליפ בו-טאן ומכ"ל אנבידיה ג'נסן הואנג, נפגשים לפחות פעמיים בחודש כדי לדון בהתקדמות התהליך במטרה להוציא את המעבדים לשוק מהר ככל האפשר. במקביל להסכם עם אנבידיה, אינטל תמשיך לייצר ולשווק מעבדים הכוללים את רכיב ה-GPU שלה עצמה. בשלב הראשון המעבדים עם המאיצים הגרפיים של אנבידיה ייועדו לשוק המחשבים החזקים (פרימיום), והמעבדים עם מאיצי אינטל ייועדו לשוק המחשבים הניידים הפחות יקרים. יחד עם זאת, עדיין לא ברור כיצד המהלך הזה יתפתח, לאור העובדה שיש כוונה להרחיב את שיתוף הפעולה עם אנבידיה גם למחשבים זולים יותר.
בתחום השרתים למרכזי נתונים (Data Center), נחשףכיאינטלתייצרמעבדXeon המותאם ייעודית (Custom) לצרכים של אנבידיה ולערוץ הקישוריות שלה. כלומר, המעבדים בתוך ה-SoC יהיו מקושרים ביניהם באמצעות ערוץ התקשורת המהיר של אנבידיה, NVIDIA NVLink. אינטל לא תמכור את הרכיב בשוק החופשי או ללקוחות צד שלישי, אלא תספק אותו ישירות לאנבידיה, והיא תהיה זושתטפל בשיווק ומכירת מערכות שלמהללקוחותהקצה. למעשה, מדובר בעיסקה של קבלנות ייצור (Foundry) שאינטל מבצעת עבור אנבידיה.
בתחום הזה אינטל עדיין מתלבטת. פיצר סיפר שכעת נבדק רעיון של בו-טאן, שלפיו היא תמקד את טכנולוגיית ה-GPU שלה במרכיב ההסקות (inference), ולא במרכיב האימון של מערכות בינה מלאכותית. "כאשר בודקים מה מתרחש היום בשוק האימון במרכזי הנתונים הגדולים (hyperscale), אנחנו חושבים שהשוק מקבל פתרונות טובים מחברות כמו אנבידיה ומיצרני פתרונות ASIC. יש הזדמנות אמיתית בפתרונות הסקה אופטימליים עבור Agentic AI ו-Physical AI. זה השוק שאליו אנחנו מכוונים".
אינטל נכנסת לשוק ה-ASIC
במהלך השיחה חשף פיצר אסטרטגיה חדשה של אינטל, אשר צפויה לאיים ישירות על חברות כמו מארוול (Marvell) וברודקום (Broadcom): תכנון וייצור רכיבי ASIC לצרכים שונים, כולל למערכות תקשורת וקישוריות. פיצר: "אני רוצה להזכיר לכם שאנחנו למעשה חברת ASIC עם הרבה מאוד נצחונות תכנון בתחום הקישוריות. תחום ה-ASIC אינו חדש עבורנו. יש לנו אבני בניין רבות ואנחנו צריכים להיות משתתף משמעותי יותר בתחום הזה".
לדבריו, הפעילות של אינטל בשוק החדש הזה עבורה תוכל להתבסס על ארכיטקטורת x86 או על ארכיטקטורת ARM, כאשר אינטל שוקלת לייצר אותם גם במפעליה וגם אצל קבלניות משנה. "מעבדי ARM מוצלחים מאוד בעיבוד עומסים בתוך מרכזי הנתונים, ופחות מוצלחים בטיפול בעומסים חיצוניים. אין שום סיבה מדוע שלא יהיו רכיבי ASIC מבוססי x86 בשוק הזה. "בו-טאן נפגש עם הרבה מאוד לקוחות של פתרונות ASIC וגילה שהם לא מרוצים מהספקים שלהם. אנחנו חושבים שיש כאן הזדמנות".
תהליך A18 מתחיל להתבגר
בנוגע לתהליך הייצור המתקדם ביותר של אינטל,A18, פיצר דיווח שהחברה השיגה קצבשיפורבתפוקה(Yields) שלכ-7% מדיחודש. "זהוקצבמקובללהטמעתטכנולוגיהחדשה.הואמסמןחזרהלמסלוליציבלקראתייצורהמונישלמעבדיPanther Lake". הוא הביעאופטימיותלגבי התהליך הבא, A14, בעקבות שינויאסטרטגיבשיטתהפיתוח: בניגודלתהליךA18 שהחל מהתמקדות בצרכיםהפנימייםשלהחברה, הפיתוח של A14 מאופיין במעורבותעמוקהשללקוחותחיצוניים. בזכות זאת, למשל, ערכותהפיתוח(PDK) נמצאותכברכעתברמתבשלותגבוהה יותר בהשוואהלשלבהמקבילבפיתוח A18.
בנוסף, הוא הסביר ש-A14 נהנה מנקודת פתיחה טובה יותר. המעבר לתהליך A18 דרש מאינטל להטמיע שתי טכנולוגיות חדשות במקביל: שימוש בטרנזיסטורי GAA והטמעת תשתית הובלת האנרגיה החדשה, Backside Power. תהליך A14 מתבסס על הדור השני של טכנולוגיות אלו, והבשלות שלהן מקטינה את הסיכונים ההנדסיים. הוא אמר שהשנה הקרובה (6-12 חודשים) הם חלון הזמן הקריטי להשגת לקוח חיצוני ראשון לתהליך זה.
שלוש מהחברות המרכזיות ביותר באקוסיסטם ה-AI העולמי — מיקרוסופט, אנטרופיק ואנבידיה — הכריזו על מהלך אסטרטגי משולש שעתיד להשפיע על שוק המודלים, תעשיית השבבים ושרשרת האספקה של תשתיות בינה מלאכותית. על פי ההודעה המשותפת של החברות, אנטרופיק תתחייב לרכוש מחשוב בענן בהיקף של 30 מיליארד דולר ממיקרוסופט Azure, ולצדו תקים תשתית ייעודית של עד ג'יגה־וואט אחד המבוססת על ארכיטקטורות הדור הבא של NVIDIA — Grace Blackwell ו-Vera Rubin.
במקביל, מיקרוסופט ו-NVIDIA ישקיעו בחברת אנטרופיק: NVIDIA תזרים עד 10 מיליארד דולר, ומיקרוסופט עד 5 מיליארד דולר. ההסכם כולל גם שיתוף פעולה הנדסי בין אנטרופיק ל-NVIDIA שמטרתו לשפר את ביצועי מודלי Claude על גבי ארכיטקטורות הצ'יפ העתידיות, ולהתאים את מערכות ההאצה לדפוסי האימון והאינפרנס של החברה.
עבור מיקרוסופט, השותפות כוללת שילוב רחב של מודלי Anthropic — בהם Claude Opus 4.1, Sonnet 4.5 ו-Haiku 4.5 — בפלטפורמת Azure AI Foundry ובמשפחת Copilot. בכך Azure הופכת לאחת הפלטפורמות היחידות שמציעות בו-זמנית מודלים של OpenAI וגם מודלים של Anthropic.
מיקרוסופט: שימור כוח העל בענן – ותגובה עקיפה לטלטלות עם OpenAI
עבור מיקרוסופט, השותפות עם אנטרופיק מהווה צעד נוסף בדוקטרינה החדשה: לא עוד הסתמכות מוחלטת על שותף אחד. אחרי שנה רצופת מתחים עם OpenAI — מהמשבר הניהולי ועד שאלות על בלעדיות — ענקית התוכנה מאותתת ללקוחות הענן שלה שהיא מציעה "קואליציית מודלים", ולא אקוסיסטם סגור.
השילוב של Claude ב-Azure מאפשר למיקרוסופט להרחיב את היצע ה-AI שלה בתחום הארגוני והרגולטורי, שבו לא פעם נדרשת ללקוחות גמישות בבחירת מודלים לצרכים שונים: בטיחות, פרטיות, פרשנות, עלויות או ביצועים. מבחינתה של מיקרוסופט, Anthropic מעניקה לגיטימציה נוספת ל-Azure כענן המוביל לעבודה עם מודלים מהשורה הראשונה — במיוחד כשחברות ענק מחפשות להימנע מתלות בלעדית בשחקן אחד.
אנבידיה: מהלך נוסף בשרשרת עסקאות סיבוביות
בצלע השנייה, NVIDIA ממשיכה לבסס את עצמה לא רק כיצרנית השבבים הדומיננטית של עידן ה-AI, אלא גם כגורם פיננסי אסטרטגי שמעצב את האקוסיסטם סביבו. כמו בעסקה המפורסמת עם OpenAI — אם כי בהיקף שונה — גם כאן החברה מזרימה הון לאחת ממעבדות ה-AI המובילות, שמיד משתמשת בו להרחבת תשתיות המחשוב שלה המבוססות על מאיצי NVIDIA.
מדובר במנגנון סיבובי: NVIDIA משקיעה בחברות שמייצרות את הביקוש הגדול ביותר למוצריה, והן בתמורה רוכשות עוד שרתים, עוד מאיצים ועוד אינפרה המבוססת על הארכיטקטורות Blackwell ו-Rubin. זהו חלק ממדיניות רחבה יותר, שבמסגרתה NVIDIA משתמשת בכוח האש הפיננסי העצום שלה כדי לבסס סביבה אקוסיסטם טכנולוגי שבו מודלי הפרונטיר, פלטפורמות הענן והחומרה שלה מחזקים זה את זה.
השותפויות הללו מספקות ל-NVIDIA לא רק ביקוש מובטח לשנים קדימה, אלא גם משוב הנדסי איכותי המגיע מהחברות שנמצאות במרכז מירוץ המודלים — מידע קריטי שמזין את תכנון הדורות הבאים של המאיצים.
עם זאת, יש מי שרואים במבנה העסקאות הזה — שבו השקעה מובילה כמעט אוטומטית לרכישת חומרה מהמשקיע עצמו — סימן אפשרי לבועה, או לפחות למערכת תמריצים שבנקודה מסוימת עלולה להיות בלתי-יציבה.
Anthropic: כניסה עמוקה לאקוסיסטם של Azure והרחבת האחיזה בשוק הארגוני
בצלע השלישית, אנטרופיק מקבלת מהלך משנה־משחק: גישה לחוות מחשוב בקנה מידה חסר תקדים, השקעה של שניים מהשחקנים העשירים בעולם, ופתיחה רחבה לאקוסיסטם של Azure — בדיוק באזור שבו היא כבר נחשבת לבעלת נתח השוק המשמעותי ביותר בקרב ארגונים ומפתחים. שני הסגמנטים הללו הם גם ליבת הכוח של מיקרוסופט, ולכן המהלך יוצר היצמדות אסטרטגית בין שתי שחקניות שמדברות לאותו קהל.
השילוב של מודלי Claude בתוך Azure AI Foundry צפוי להאיץ משמעותית את אימוצם בקרב חברות גדולות, במיוחד כאלה שכבר עובדות בסביבה מבוססת Copilot, Dynamics, Office 365 או תשתיות Azure אחרות. עבור אנטרופיק, מדובר בקפיצה נוספת במיצוב שלה כמתחרה ישירה ל-OpenAI ול-Google DeepMind — עם פריסה רחבה יותר, נגישות גבוהה יותר לקהל הארגוני, יציבות פיננסית מוגברת וגב תשתיתי שמחזק את מעמד החברה במירוץ המודלים.
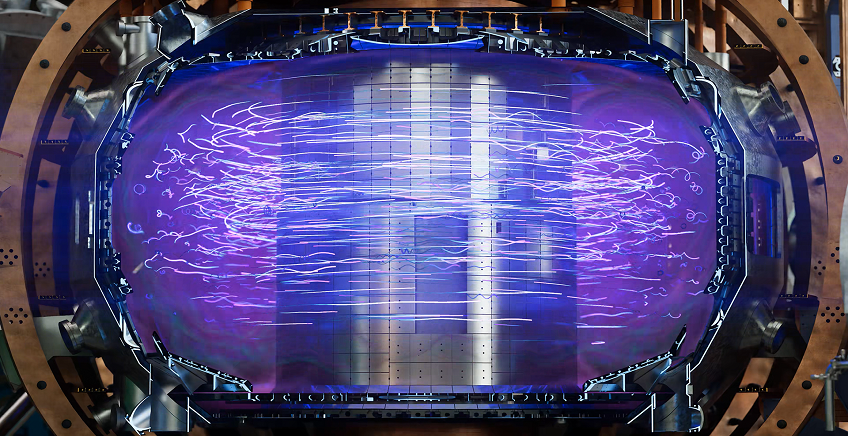
שיתוף פעולה חדש בין אנבידיה לחברת General Atomics מביא לראשונה את עולם ההיתוך הגרעיני אל עידן הבינה המלאכותית. במסגרת הפרויקט, שהוכרז במסגרת כנס GTC השבוע בוושינגטון, החברות יפתחו תאום דיגיטלי (Digital Twin) מתקדם למתקן DIII-D שבסן־דייגו – כור ניסויי שנחשב לאחד המרכזיים בעולם במחקר פלזמה. התאום הדיגיטלי ישלב מודלים מבוססי AI, הדמיות פיזיקליות ונתוני חיישנים בזמן אמת, במטרה לחזות את התנהגות הפלזמה ולייעל את תכנון הדור הבא של כורי היתוך.
התאום הדיגיטלי יתפקד כהעתק וירטואלי חי של הכור, המסונכרן עמו ברציפות ומאפשר לחוקרים “להפעיל” את הכור דיגיטלית: לשנות תנאים, לבדוק תגובות ולחזות מצבי קיצון מבלי לסכן ציוד או להשבית ניסויים. המטרה: להמיר שנים של ניסוי וטעייה למודלים ממוחשבים הנלמדים בזמן אמת ומניבים תחזיות מהימנות על יציבות הפלזמה.
האתגרים בדרך להיתוך נותרו עצומים. היתוך גרעיני הוא תהליך שבו שני גרעיני מימן קלים מתמזגים לגרעין הליום ומשחררים כמות אדירה של אנרגיה — בדומה למה שמתרחש בליבת השמש — והוא נחשב לדרך נקייה ובטוחה להפקת חשמל. כדי להפיק אנרגיה עודפת בתנאי מעבדה, יש לשמור פלזמה – גז יונים טעון וחם במיוחד שבו מתרחש ההיתוך – בטמפרטורה של עשרות מיליוני מעלות ובמצב יציב מספיק לאורך זמן. תנודות זעירות בלחץ, בטמפרטורה או בשדה המגנטי עלולות למוטט את התהליך כולו. גם החומרים המרכיבים את דפנות הכור חייבים לעמוד בפני קרינה וחום קיצוניים מבלי להישחק. כאן נכנסים מודלים מבוססי AI – הם מאפשרים למידה ממאות אלפי ניסויים קודמים, חיזוי של אי־יציבויות בזמן אמת, ובקרה חכמה שמגיבה מהר יותר מכל מערכת אנושית.
ג’נרל אטומיקס נחשבת לחלוצה עולמית בתחום ההיתוך המגנטי. מאז שנות ה־50 היא מנהלת את מתקן DIII-D ומספקת רכיבים מרכזיים לפרויקט ITER הבינלאומי, בהם מגנט־העל המרכזי – הגדול והחזק מסוגו בעולם. גישתה מתאפיינת בשילוב הדוק בין מדע לפיתוח הנדסי: מהבנת הפיזיקה של הפלזמה ועד תכנון מערכות בקרה, חיישנים ומודלים חישוביים. שיתוף הפעולה עם אנבידיה מרחיב את הגישה הזו לעידן החדש של אנרגיה מבוססת מידע. אם התאום הדיגיטלי של DIII-D יצליח לספק תחזיות מדויקות ולייעל את שלבי הפיתוח, ייתכן שמדובר בצעד ממשי ראשון בדרך למימוש חזון ההיתוך המסחרי.
כשפלזמה פוגשת בינה מלאכותית: הדור החדש של התאומים הדיגיטליים
בהקשר של היתוך גרעיני, התאום הדיגיטלי שמפתחות אנבידיה וג'נרל אטומיקס מייצג מדרגה חדשה לחלוטין בעולם ההנדסה הממוחשבת. אמנם תאומים דיגיטליים קיימים כבר שנים – במנועי מטוסים, במערכות ייצור ואף במודלים ביולוגיים – אך כאן האובייקט שמדמים איננו מנוע או מבנה קשיח, אלא פלזמה: מצב חומר טעון, לוהט ודינמי שנע במהירות עצומה ומגיב לכל שינוי פיזיקלי כמעט מיד. לכן, התאום הדיגיטלי של כור ההיתוך חייב לא רק להעתיק את המציאות, אלא לחזות בזמן אמת את ההתנהגות הכאוטית של הפלזמה ולזהות רגעים של חוסר יציבות – תהליך שדורש רמת חישוב וזמן תגובה שמעבר למה שמוכר מעולם התאומים הדיגיטליים הקלאסיים.
האתגר טמון בכך שכדי לשלוט בפלזמה, יש למדל במקביל תופעות מגנטיות, תרמודינמיות ואלקטרוניות המתרחשות בקצב של מיליוניות השנייה. המשמעות היא שתאום ההיתוך אינו רק “סימולציה ויזואלית”, אלא מערכת בקרה חיה, שמגיבה בזמן אמת לנתוני ניסוי ולחיישנים פיזיים מהכור. בנוסף, עליו לשלב דיסציפלינות רבות — פיזיקת פלזמה, הנדסת חומרים, בקרה, עיבוד נתונים ובינה מלאכותית — תחת מודל אחד אחוד. גם כאן מדובר בקפיצה קונספטואלית: לא עוד מודל סטטי של מערכת, אלא תאום לומד, שמתעדכן ומשפר את עצמו בכל אינטראקציה עם העולם האמיתי.
כדי להתמודד עם מורכבות כזו, נדרשת עוצמת מחשוב עצומה. לכן גויסו לפרויקט שני מחשבי־על מהחזקים בארצות הברית: Polaris ממעבדת Argonne ו־Perlmutter ממעבדת לורנס ברקלי. מחשבים אלה, בעלי הספק של עשרות פטהפלופס, מריצים במקביל את המודלים הפיזיקליים והאלגוריתמים של הבינה המלאכותית, תוך עיבוד כמויות נתונים עצומות מניסויי פלזמה אמיתיים. Polaris משמש בעיקר לאימון המודלים וללמידת תבניות מהנתונים, בעוד Perlmutter מפעיל את הסימולציות ברזולוציה גבוהה ומאפשר חיזוי בזמן אמת של תופעות בתוך הכור.
בשלב זה נכנסים הכלים של אנבידיה, שמאפשרים להפוך את כל המערך הזה לישים בפועל. אנבידיה תספק את תשתיות המחשוב החזקות שלה – בהם פלטפורמות CUDA-X ו־Omniverse – שיאפשרו הרצה של סימולציות מדויקות ברזולוציה חסרת תקדים. CUDA-X מספקת את הבסיס החישובי: אוסף ספריות וכלים המנצלים את כוח ה־GPU להאצת חישובים מדעיים ובינה מלאכותית, בעוד Omniverse משמשת כמרחב סימולציה תלת־ממדי שבו מתממשק התאום הדיגיטלי כולו – עם ויזואליזציה בזמן אמת, אינטגרציה של נתוני חיישנים ויכולת “להריץ” את הכור באופן וירטואלי. השילוב הזה – בין מחשוב־על, בינה מלאכותית וסביבת תאום דיגיטלי רבת־עוצמה – הופך את פרויקט ההיתוך של General Atomics לאחד הניסיונות הראשונים בעולם לייצר מערכת מדעית שיכולה להבין את עצמה בזמן אמת.
בתמונה למעלה: מנכ"ל פורטליקס, זיו בנימיני (משמאל), ביחד עם Xinzhou Wu, סגן נשיא NVIDIA Automotive, שינג'ו וו
חברת אנבידיה תשלב תשלב את מערך הכלים Foretify Physical AI של פורטליקס (Foretellix) הישראלית בתהליך פיתוח פלטפורמת הרכב NVIDIA Drive AV. המפתחים של אנבידיה ייעזרו בתוכנת פורטליקס כדי לבצע אימון, בדיקה, אימות והערכת בטיחות ואיכות של כלי רכב אוטונומיים. השילוב בין היכולות של פורטליקס בתחום הבדיקות והאימות (Coverage-Driven Verification and Validation) וייצור דטה סינתטי (Synthetic Data Generation) לבין תוכנת הנהיגה אוטונומית של אנבידיה, מיועד לתמוך ברמות האוטונומיה L2++, L3 ו־L4.
“הבטיחות היא זו שתגדיר את עתיד ה־Physical AI,” אמר זיו בנימיני, מנכ"ל ומייסד שותף של פורטליקס. סגן נשיא וראש תחום הרכב באנבידיה (NVIDIA Automotive), שינז’ו וו (Xinzhou Wu), אמר שהטכנולוגיה של פורטליקס מחזקת את הבסיס הבטיחותי של תעשיית הרכב האוטונומי. "השילוב בין תוכנת NVIDIA Drive AV לבין כלי ה־Physical AI של פורטליקס לאימות מבוסס תרחישים בקנה מידה גדול, מסייע לנו לקדם סטנדרטים של שקיפות, רובסטיות ובטיחות. מפתחי אנבידיה יוכלו לתכנן ולבדוק כלי רכב עם יותר ביטחון ובקנה מידה גדול".
שיתןף הפעולה החל בהשקעה אסטרטגית
המהלך הנוכחי מרחיב את שיתוף הפעולה בין שתי החברות, אשר החל בהשקעה של אנבידיה בפורטליקס במהלך גיוס ההון בסבב C של החברה, והתפתח לשילוב טכנולוגיות NVIDIA Omniverse ו-NVIDIA Cosmos בפלטפורמת Foretify של פורטליקס. טכנולוגיית Foretify מביאה לתעשיית הרכב את גישת האימות (וריפיקציה) Coverage Driven Verification המשתמשת בתעשיית השבבים, אשר מבוססת על שפת Hardware Verification Language שהומצאה על-ידי אחד ממייסדי פורטליקס, יואב הולנדר, במסגרת חברת וריסיטי שנמכרה לקיידנס.
הטכנולוגיה מאפשרת לעבור מהתמקדות בכמות הקילומטרים שנסע הרכב האוטונומי הנבדק (Quantity of Miles), להתמקדות באיכות הכיסוי (Quality of Coverage), כלומר ביכולת של הרכב להתמודד עם מאות מיליוני תרחישים הנדרשים על-מנת להגיע לרמת הבטיחות הנדרשת, ואספקת מדדים כמותיים המאפשרים להוכיח בצורה ודאית את איכות הכיסוי של המערכות האוטונומיות. כיום היא נחשבת לאחת מספקיות כלי ה-Physical AI המובילות בתעשיית הרכב האוטונומי.
אנבידיה הודיעה כי תרחיב משמעותית את מרכז המחקר והפיתוח שלה בבאר שבע, שיעבור לאתר חדש בפארק ההייטק גב-ים בעיר ויתפרש על שטח של כ-3,000 מ"ר — פי שלושה מגודלו הנוכחי. המרכז המורחב צפוי להתחיל לפעול במתכונת מלאה עד סוף המחצית הראשונה של 2026.
המהלך יכלול גיוס של מאות עובדים נוספים בדרום, בהם מהנדסי חומרה ותוכנה, מפתחי שבבים, ארכיטקטים, סטודנטים ובוגרי תארים מתקדמים. מדובר באתר הדרומי ביותר של אנבידיה בישראל, המצטרף למרכזי הפיתוח בתל אביב, רעננה, יוקנעם, מבוא כרמל ותל חי.
"הרחבת מרכז הפיתוח של אנבידיה בבאר שבע משקפת את המחויבות שלנו להגיע אל המהנדסות והמהנדסים הטובים ביותר — בכל מקום שבו הם נמצאים", אמר עמית קריג, סגן נשיא בכיר ב-NVIDIA ומנהל הפעילות בישראל. לדבריו, האתר החדש יהווה בית מקצועי לצוותים שיפתחו את הדור הבא של טכנולוגיות חומרה ותוכנה לעולמות הבינה המלאכותית.
ראש עיריית באר שבע רוביק דנילוביץ' בירך על ההחלטה, ואמר כי "הרחבת הפעילות פי שלושה בעיר מהווה בשורה גדולה לנגב ומבטאת אמון באקו-סיסטם המקומי. המהלך צפוי לחזק את ההון האנושי ולהוסיף מאות מקומות עבודה איכותיים".
מרכז הפיתוח בבאר שבע לוקח חלק בפיתוח מערכות תקשורת מרכזיות לעולמות ה־AI, בהן מוצרי NVIDIA Spectrum-X, רשתות InfiniBand Quantum-X, מתאמי ConnectX, מעבדי BlueField DPU ומעבדי שרת למרכזי נתונים.
אנבידיה מעסיקה כיום למעלה מ־5,000 עובדים בישראל. מאז רכישת מלאנוקס בשנת 2020, החברה יותר מהכפילה את מספר העובדים המקומיים, וממשיכה להרחיב פעילות עם מאות משרות פתוחות ברחבי הארץ.
בתמונה למעלה: Panther Lake שיוצר במפעל אינטל באריזונה. צילום: אינטל
חברת אינטל (Intel) חשפה אתארכיטקטורת המחשוב האישי מהדור הבא, Panther Lake, המיועדת לעידן הבינה המלאכותית. המעבדים יושקו תחת שם המותג Intel Core Ultra. זהו המוצר ההמוני הראשון של אינטל המבוסס על תהליך הייצור Intel 18A, המייצג רוחב צומת של 1.8 ננומטר. טכנולוגיית ייצור הזו כוללת שתי טכנולוגיות יסוד חדשות: טרנזיסטורים חדשים מסוג RibbonFET המספקים שיפור במהירות המיתוג, ומערך הולכה החשמלית PowerVia, אשר מפריד בין קווי אספקת המתח עבור הטרנזיסטורים ובין קווי הולכת המידע. הדבר מאפשר לשפר את ביצועי השבב ולהגדיל את מספר הטרנזיסטורים בשטח נתון.
פרוייקט הפיתוח התנהל במספר מרכזים של אינטל בעולם, אולם הוא הובל על-ידי צוות המפתחים הישראלים של החברה, אשר כלל כמה מאות מהנדסים אשר עבדו בצמוד למפעל פיתוח תהליכי הייצור של אינטל באורגון, ארה"ב. מנהל פרויקט Panther Lake באינטל, זוהר צבע, סיפר ל-Techtime שהמפתחים שילבו שתי ארכיטקטורות מעבדים קודמות בעלות מיקוד שונה: פלטפורמת Lunar Lake (שפותחה גם היא בישראל והושקה בשנה שעברה) שתוכננה עם דגש על יעילות אנרגטית וצריכת חשמל נמוכה, ופלטפורמת Arrow Lake (הושקה ב-2025) שנועדה לספק רמות ביצועים גבוהות לעומסי עבודה כבדים.
הספקנות הוכחה כלא נכונה
המעבד החדש בנוי במתכונת של רכיב מרובה-שבבים המכיל שלושה אריחי סיליקון מרכזיים: אריח המחשוב המרכזי של המעבד (Compute Tile) שפותח כולו בישראל מיוצר בתהליך 18A וכולל כ-3 מיליארד טרנזיסטורים. הוא כולל עד 16 ליבות עיבוד (CPU) ומנוע AI המספר עוצמת עיבוד של עד 180TOPS (טריליון פעולות בשנייה), המאפשרת להריץ מודלי AI מורכבים ישירות על המחשב. אריח העיבוד הגרפי כולל מעבד GPU בארכיטקטורת Xe3 החדשה המיוצרת בחברת TSMC, ואריח הבקרה אחראי על הקישוריות בין המעבד לבין העולם החיצון. הוא כולל ממשקי תקשורת מרובים, דוגמת PCIe, Wi-Fi, Thunderbolt ו-Bluetooth.
מפעל הייצור של תהליך 18A, פאב-52 בצ'נדלר, אריזונה, אשר נחנך החודש
לדברי צבע, בתעשייה הטילו ספק ביכולתה של אינטל להביא לשוק מעבד בשל במיוצר בתהליך של פחות מ-2 ננומטר. "אולם הוכחנו שהדבר אפשרי. עד היום נישלחו כמה מאות אלפי מעבדים ללקוחות, ועד סוף 2025 נעבור לייצור המוני. בתחילת 2025 כבר יגיעו לשוק המחשבים הראשונים המצויידים במעבדי Panther Lake". הייצור ההמוני יתבצע במפעל Fab-52 בצ'נדלר, אריזונה, אשר נחנך החודש במקביל להכרזה על מעבדי Panther Lake.
חברת אינטל לא מסרה שום מידע על המעבדים שבאמצעותם היא תיישם את הסכם שיתוף הפעולה עם אנבידיה. כזכור, לפני כשלושה שבועות נחתם הסכם לשיתוף פעולה טכנולוגיה ועסקי בין אינטל ואנבידיה. אחד מהמרכיבים המעניינים בהסכם הזה נוגע לשוק המחשבים הניידים: החברות סיכמו שאינטל תייצר ותמכור רכיבי SoC המבוססים על ארכיטקטורת x86, אשר כוללים את המעבדים הגרפיים של אנבידיה ממשפחת RTX GPU. המודולריות המובנית של משפחת Panther Lake, והגדרת שוק היעד שלה, מלמדים שככל הנראה זו תהיה הפלטפורמה שתביא את אנבידיה, לראשונה בתולדותיה, אל שוק מחשבים אישיים שהיקפו נאמד בכ-150 מיליון יחידות בשנה.
[בתמונה למעלה: אתר בניית מרכז הנתונים של Stargate Project בטקסס]
OpenAI ואנבידיה הודיעו אתמול (ב') על שותפות אסטרטגית שמטרתה פריסת לפחות 10 גיגה-וואט של מערכות אנבידיה לשימוש OpenAI. ההשקעה של עד 100 מיליארד דולר תתבצע בהדרגה, בהתאם לפריסת התשתיות והגעה לאבני דרך. השלב הראשון צפוי להתחיל במחצית השנייה של 2026, ולהתבסס על פלטפורמת Vera Rubin של אנבידיה – הדור הבא של מערכות המחשוב שתחליף את פלטפורמת Blackwell, והיא צפויה לצאת לשוק כבר בשנה הקרובה.
במסגרת ההסכם, אנבידיה מוגדרת כשותפה המועדפת של OpenAI בתחום החישוב (compute) והרשתות (networking), ותהיה מעורבת לא רק באספקת החומרה אלא גם בתכנון ובאופטימיזציה של התשתיות. לצד אנבידיה, OpenAI משתפת פעולה עם שורה של ענקיות טכנולוגיה נוספות — בהן Microsoft, Oracle, SoftBank ו-Stargate — כדי להבטיח זמינות קיבולת עצומה לענן הבינה המלאכותית.
ב-OpenAI ציינו כי לשירותי החברה נכנסים מדי שבוע יותר מ-700 מיליון משתמשים פעילים, וכי אימוץ מהיר נרשם גם בקרב חברות ועסקים גדולים. לפי החברה, הקיבולת החדשה נועדה לענות על הצמיחה האדירה הזו ולאפשר פריסת יישומים רחבים עוד יותר. 100 ג׳יגה־וואט של מערכות מחשוב משמעם הקמה של תשתיות ענק בהיקף של עשרות דאטה סנטרים מהמתקדמים בעולם – סדר גודל שמספיק להפעיל ולשרת מודלים טריליאוניים בקנה מידה גלובלי.
לפי דיווחים, אנבידיה תקבל מניות ב-OpenAI כחלק מההשקעה, אך לא פורסם כמה אחוזים בדיוק. מדובר בהחזקת מניות שאינה מקנה שליטה מלאה (“non-controlling equity”). הערכות שוק נוכחיות מציבות את שווי OpenAI סביב 500 מיליארד דולר, כך שהשקעה של עד 100 מיליארד דולר מהווה נתח משמעותי.
השותפות מדגישה את הקרב האסטרטגי על משאב המפתח של עידן הבינה המלאכותית: קיבולת חישוב. אנבידיה מבססת את עצמה לא רק כספקית שבבים, אלא כשותפה אסטרטגית למובילת התחום, ובכך מבטיחה לעצמה מעמד דומיננטי גם בשנים הקרובות. OpenAI, מצדה, משריינת לעצמה משאבים חסרי תקדים ומקבעת יתרון תחרותי משמעותי מול מתחרות שייאלצו להתמודד על קיבולת מוגבלת. עם זאת, ההיקף האדיר של ההשקעה מעלה שאלות על עלויות חשמל, קירור וקיימות, לצד החשש מתלות הדדית שתצמצם את הגמישות של שתי החברות.
החבירה ל-OpenAI מצטרפת לעסקה נוספת שעליה הודיעה אנבידיה עם אינטל, המתמקדת בפיתוח תשתיות AI ומוצרים משולבי בינה מלאכותית גם במחשוב האישי. בכך אנבידיה מבהירה כי היא אינה נשענת על שותפות אחת בלבד, אלא בונה רשת רחבה של בריתות שמקיפה את כלל שוקי ה-AI — מהענן ועד המחשב האישי.
בכנס Huawei Connect, שנערך בסוף השבוע האחרון, חשפה וואווי את מפת הדרכים החדשה שלה לעולם הבינה המלאכותית – הכרזות שכוללות שבבים חדשים ממשפחת Ascend 950, קונספט של SuperPods ו-SuperClusters בקנה מידה של אלפי יחידות חישוב, ופרוטוקול חיבור מהפכני שנועד להפוך את המערכות הענקיות האלה למחשב־על אחיד.
הדגש אינו רק על כוח עיבוד גולמי, אלא על האופן שבו מחברים אלפי שבבים יחד, כך שהמערכת הכוללת תספק ביצועים של "שבב אחד ענק". בכך מנסה וואווי להגדיר מסלול עוקף למגבלות שנכפו עליה מצד מגבלות הסחר והגישה לתהליכי ייצור שבבים מתקדמים.
וואווי הציגה שני שבבים חדשים ממשפחת Ascend: הראשון, Ascend 950PR, מותאם במיוחד להפעלה של מודלי בינה מלאכותית ומצטיין ביעילות בעיבודים מדויקים פחות אך מהירים יותר. השני, Ascend 950DT, פותח לאימון של מודלים ענקיים ודורש חיבורים רחבים ומהירים יותר לזיכרון. לצד השבבים עצמם, וואווי הכריזה גם על מערכות־על חדשות: Atlas 950 SuperPod, הכולל למעלה מ־8,000 שבבים ומסוגל להגיע להספקי חישוב אדירים, ו־Atlas 960 SuperPod, גרסה גדולה עוד יותר עם כמעט 15,500 שבבים שמציבה רף חדש בהיקפי העיבוד שמרכז נתונים אחד יכול לספק.
סופרפודים כעמוד השדרה של עידן הטריליון פרמטרים
לפי החברה, המערכות הללו אינן מוגבלות לאימון בלבד. הן נועדו לתמוך גם בהפעלת מודלים עם טריליון־פרמטרים בקנה מידה המוני, עם מענה לעשרות אלפי בקשות בו־זמנית. בנאום הראשי בכנס אמר יו״ר וואווי, סו ג'יז'ון (Xu Zhijun): “אנחנו בונים מערכות שיכולות לגדול ליניארית – לא משנה אם מדובר בעשרות או בעשרות אלפי שבבים. החידוש האמיתי הוא בחיבוריות שמאפשרת לכל הרכיבים לעבוד כמחשב אחד.”
המונח סופרפוד אינו זר לעולם הבינה המלאכותית – גם חברת אנבידיה משתמשת בו כדי לתאר מערכות ענק שמורכבות מאשכולות שרתים. אלא שוואווי בחרה לתת למושג הזה משמעות שונה: היא מדגישה את יכולת ההתרחבות האגרסיבית של המערכות שלה ואת העובדה שהן מותאמות גם לאימון של מודלים חדשים וגם להפעלה שוטפת שלהם. “בעידן שבו מודלים מכילים כבר טריליוני פרמטרים, לא ייתכן שהחסם יהיה הרשת שמחברת את השבבים,” אמר יו״ר וואווי, סו. “לכן פיתחנו רשת חיבור אחידה שמייתרת את הצורך בפרוטוקולים שונים בכל שכבת מערכת.”
חיבור אחיד במקום טלאי של פרוטוקולים: היתרון שוואווי מציגה על פני אנבידיה
החידוש הבולט ביותר בהכרזות של וואווי הוא מערכת חיבור חדשה בשם UnifiedBus 2.0 (או בקיצור UB, שם הקוד שלה הוא Lingqu). המשמעות של המונח פשוטה יחסית: זהו פרוטוקול תקשורת אחיד שנועד לחבר בין כל שכבות המערכת – מהשבב הבודד, דרך הכרטיסים והרכיבים שבשרתים, ועד לרמת הארונות (racks) שמרכיבים את מרכזי הנתונים.
בניגוד לאנבידיה, שמחלקת את העבודה בין כמה טכנולוגיות חיבור שונות – NVLink לחיבור ישיר בין מעבדים גרפיים באותו שרת, NVSwitch לניהול התקשורת בתוך ארון, ו-InfiniBand או Ethernet כשעוברים בין ארונות – וואווי מנסה לאחד הכול לשפה אחת רציפה.
כך, בתוך כרטיסי ה-Ascend עצמם, השבבים מתקשרים זה עם זה בפרוטוקול UB. גם בתוך השרתים ובתוך הארונות נעשה שימוש באותו פרוטוקול, לעיתים באמצעות כבלים אופטיים מהירים. כשעוברים בין ארונות שונים – עדיין מדובר באותה שפה, ללא צורך בתרגום לרשת תקשורת אחרת.
המשמעות המעשית היא שהעיכוב (latency) בזמן העברת הנתונים קטן יותר, הניהול פשוט יותר, וניתן להפעיל מערכות בהיקף של אלפי שבבים כך שיתפקדו כמעט כמו רכיב אחיד. החזון של וואווי הוא שמערכות הסופרפוד ייראו כמו מחשב־על ענק הפועל בתוך מרכז נתונים, עם שורות של ארונות עמוסים בכרטיסי Ascend, כולם מחוברים באותה רשת אחידה – במקום פסיפס של שכבות חיבור שונות, כפי שנהוג כיום.
אסטרטגיה מול מגבלות הסחר
החידוש הארכיטקטוני הזה אינו מקרי. וואווי מודה בגלוי שבמירוץ לייצור שבבים בתהליכים מתקדמים במיוחד – ברמות של שלושה ננומטר ושני ננומטר – היא אינה יכולה להתחרות בטייוואן או בחברות האמריקאיות. כפי שניסח זאת סו בנאומו: "אנחנו יודעים שסין תמשיך לפגר בכל הנוגע לגיאומטריות מתקדמות. לכן עלינו למצוא יתרון במקום אחר – בארכיטקטורה ובחיבוריות."
במקום להשקיע את כל המשאבים ביצירת שבב אחד חזק במיוחד, וואווי בונה מערכים שמורכבים מהרבה שבבים בינוניים יחסית, ומחברת אותם כך שיפעלו כיחידה אחת. הרעיון הוא להפוך את המגבלה ליתרון: ליצור רשת חיבור אחידה שמאפשרת לחלק את העומס בין רכיבים רבים, להשתמש בפורמטי חישוב מדויקים פחות אך יעילים יותר, ובכך להגיע להספקי עיבוד עצומים גם בלי להסתמך על הטרנזיסטורים הקטנים והמתקדמים ביותר.
במציאות של סנקציות אמריקאיות והגבלות ייצוא על מעבדים מתקדמים, וואווי מציעה פתרון מקומי שמכוון להפעיל מודלי בינה מלאכותית בקנה מידה עולמי. בעוד אנבידיה נשענת על מערך תוכנה רחב ותהליכי ייצור מהמתקדמים ביותר, וואווי מנסה לייצר בידול באמצעות חדשנות בחיבוריות הפנימית. זהו הימור לא קטן: רשת אחידה שמחברת אלפי שבבים היא מהלך שאפתני מאוד, וכל תקלה בהשהיה או ברוחב הפס עלולה להפוך את היתרון המובטח לחולשה.
המהלך של וואווי מדגיש את הפערים האסטרטגיים במלחמת החומרה העולמית. אנבידיה ממשיכה להוביל עם שבבים מהחזקים בעולם, ו-וואווי מצהירה בגלוי שהיא לא תשיג אותה בטכנולוגיות הייצור – אלא תנסה לעקוף אותה באמצעות ארכיטקטורה. השאלה הגדולה שנותרה פתוחה היא האם הרעיון הזה אכן יעבוד בפועל: אם UnifiedBus יצליח להוכיח יציבות וביצועים כפי שהובטח, ייתכן שוואווי תהפוך לשחקנית מרכזית לא רק בסין אלא גם בשווקים שמבקשים אלטרנטיבה לאנבידיה, אך אם לא – המהלך עלול להתברר כטעות יקרה.
בתמונה למעלה: מנכ"ל אנבידיה ג'נסן הואנג (מימין) ביחד עם מנכ"ל אינטל ליפ-בו טאן. צילום: אינטל
חברת אינטל וחברת אנבידיה הופכות לשותפות עסקיות וטכנולוגיות. ביום ה' בערב חשפו שתי החברות הסכם שיתוף פעולה מפתיע שלהערכת מייסד ומנכ"ל אנבידיה, ג'נסן הואנג, הוא בעל פוטנציאל למכירות של עד 50 מיליארד דולר בשנה עבור שתי החברות. הברית בין שתי החברות מבוססת על שני מהלכים מרכזיים: השקעה פיננסית של אנבידיה באינטל ושיתוף פעולה טכנולוגי. על-פי ההסכם, אנבידיה תשקיע 5 מיליארד דולר בחברת אינטל תמורת מניות לפי מחיר של 23.28 דולר למניה.
מניית אינטל בנסד"ק זינקה בכ-30% והתייצבה בהמשך יום המסחר על עלייה של כ-23% (30.5 דולר), אשר העניק לה שווי שוק של כ-143.5 מיליארד דולר. התגובה של משקיעי אנבידיה היתה מרוסנת יותר: מניית החברה עלתה בכ-3.5% בלבד, והעניקה לחברה שווי שוק של כ-4.3 טריליון דולר, שהוא יותר מפי 30 מהשווי של אינטל.
אינטל מכניסה את אנבידיה לשוק חדש
המרכיב הטכנולוגי של ההסכם ממוקד בפיתוח משותף של שבבי SoC המשלבים מעבדי CPU בארכיטקטורת x86 של אינטל, ביחד עם מעבדי GPU של אנבידיה המקושרים באמצעות ערוץ התקשורת המהיר NVIDIA NVLink. הערוץ הזה מאפשר לקיים תקשורת מהירה בין מעבדי GPU ו-CPU ולהגיע לקצב העברת נתונים של עד 900GB/s. הדבר יתבצע בשתי דרכים שונות עבור שתי קבוצות מוצר מרכזיות: בשוק השרתים ותשתיות ה-AI, אינטל תייצר מעבדי x86 CPU המותאמים ספציפית לצרכים של אנבידיה, שאותם היא תשלב בתוך רכיבי ה-SoC שהיא מייצרת בחברת TSMC.
מניית אינטל בנסד"ק מגיבה להסכם עם אנבידיה
בשוק מחשבי ה-PC הניידים, אינטל תייצר ותמכור רכיבי SoC המבוססים על ארכיטקטורת x86 אולם כוללים את המעבדים הגרפיים של אנבידיה ממשפחת RTX GPU. הרכיבים האלה, אשר יביאו את אנבידיה לראשונה בתולדותיה אל שוק מחשבים אישיים שהיקפו נאמד בכ-150 מיליון יחידות בשנה, יהיו מוכרים בכינוי x86 RTX SoC. שיתוף הפעולה הזה לא יבוא במקום השימוש של אנבידיה בארכיטקטורת ARM, אלא לצידו. בשיחה עם עיתונאים שקיימו מנכ"ל אנבידיה ג'נסן הואנג ומנכ"ל אינטל ליפ-בו טאן ביום ה' האחרון, הסביר הואנג שאנבידיה תמשיך לעבוד עם ARM ותמשיך לפתח מעבדי CPU מבוססי ARM.
פוטנציאל מכירות של 50 מיליארד דולר
הואנג: "אבל נהיה לקוח גדול של אינטל". "אנחנו מחוייבים למפת דרכים מבוססת ARM. יש לנו מעבדי ARM חדשים הנמצאים בתהליכי פיתוח. זה לא משפיע על העיסקה הזו. הארכיטקטורה שלנו מתאימה לכל ארכיטקטורות המיחשוב הקיימות". הוא גם הבהיר שהעיסקה לא תפגע ביחסי העבודה של אנבידיה עם TSMC, המייצרת כיום את כל השבבים של אנבידיה".
בתשובה לשאלה מדוע ההסכם כולל השקעה הונית באינטל, הוא אמר שהמהלך יאפשר לאנבידיה לשלב מעבדי CPU של אינטל עם שבבי ה־GPU שלה ולמכור אותם במודל passthrough, שירחיב את היקף השוק של שתי החברות. הוא העריך שהעיסקה מבטאת פוטנציאל מכירות של עד 50 מיליארד דולר בשנה לשתי החברות. "הדבר יתרום להצלחת אינטל, ולכן יש בהשקעה ההונית הזו גם הגיון עסקי".
מדובר היה בארוע מעניין מאוד מבחינת המסרים הסמויים שהיו בו: ג'נסן הואנג אשר רגיל להשתתף בארועים ציבוריים כשהוא לבוש במעיל עור שחור, היה הפעם לבוש בחליפה מחוייטת ומצוחצחת. ליפ-בו טאן, שהופעתו תמיד מדוקדקת ומחוייטת, היה לבוש וסט ספורטיבי, כאילו הוא כרגע ירד מהאופנוע שלו… בפרק השאלות והתשובות, גילה טאן שהשיחות שלו עם הואנג החלו מייד לאחר שנכנס לתפקיד מנכ"ל אינטל לפני כשישה חודשים, ושצוותי הארכיטקטורה של שתי החברות כבר החלו לעבוד על השילוב הטכנולוגי בין שתי הארכיטקטורות.
[בתמונה: ארונות השרתים של מחשב-העל ג'ופיטר. מקור: מכון המחקר Julich]
אירופה סימנה השבוע ציון דרך טכנולוגי כאשר השיקה את JUPITER, מחשב-העל הראשון ביבשת בקטגוריית ה-exascale – יכולת מחשוב של קווינטיליון (10 בחזקת 18) פעולות חישוב בשנייה. זהו מחשב-העל העוצמתי ביותר שהוקם אי־פעם על אדמת אירופה. המערכת, שנבנתה במרכז המחקר יוליך שבגרמניה, מציבה את האיחוד האירופי בשורה אחת עם המעצמות הגלובליות בתחום מחשוב-העל. JUPITER מדורג כיום במקום הרביעי בעולם מבחינת כוח חישוב, אחרי El Capitan האמריקני (כ-1.74 אקסה-פלופס), Frontier האמריקני (כ-1.35 אקסה-פלופס) ו־Aurora האמריקני (כ-1.01 אקסה-פלופס).
למרות טקס ההשקה הרשמי, JUPITER טרם נכנס לפעילות מלאה. המערכת נמצאת כעת בשלבי אינטגרציה אחרונים, והפעלתה המדעית הרחבה צפויה להתחיל לקראת סוף 2025 ולהתרחב במהלך 2026.
העוצמה של JUPITER נשענת על ליבת חומרה חדשנית הכוללת יותר מעשרים אלף שבבי Grace Hopper GH200 של חברת NVIDIA, המשלבים כוח עיבוד גרפי עצום עם יחידות CPU מתקדמות. הארכיטקטורה המודולרית של המחשב מחולקת לשני חלקים: מודול הבוסטר ומודול הקלאסטר. מודול הבוסטר מהווה את מנוע החישוב המרכזי ומבוסס כמעט כולו על יחידות GPU, שנועדו לבצע סימולציות אקלימיות, חישובים מדעיים מורכבים והרצות של מודלים עצומים בבינה מלאכותית.
לעומתו, מודול הקלאסטר נשען יותר על יחידות CPU ומספק יכולות עיבוד כלליות וגמישות, כך שניתן להריץ בו משימות הדורשות שליטה רחבה בקלט־פלט או שילוב בין עבודות HPC קלאסיות לבין עומסי AI כבדים. השילוב בין שני המודולים מעניק למערכת גם כוח עצום וגם גמישות שימושית לחוקרים מתחומים שונים.
אחד המרכיבים החדשניים ב-JUPITER הוא מערך הקירור שלו. במקום מאווררים או מים קרים, נעשה שימוש בקירור ישיר במים חמים. הצנרת מעבירה מים בטמפרטורה של כשלושים עד ארבעים מעלות מעל הרכיבים הלוהטים, מה שמאפשר פיזור חום יעיל במיוחד תוך חיסכון משמעותי בצריכת אנרגיה. יתרה מזאת, החום שנפלט מהמחשב נאסף ומשמש לחימום מבנים בקמפוס יוליך, כך שהמערכת הופכת לכלי לא רק מדעי אלא גם סביבתי.
כדי לאפשר תקשורת מהירה בין עשרות אלפי השבבים והמודולים השונים, JUPITER מצויד ברשת InfiniBand Quantum-2 של אנבידיה, שפותחה במרכז המו"פ של החברה בישראל. טכנולוגיית InfiniBand Quantum-2 מספקת קצב העברה של עד 400 גיגה־ביט לשנייה לכל פורט עם השהיה מזערית. היא משמשת את JUPITER לחיבור אלפי שבבים ומודולים כך שיפעלו יחד כמעט כמחשב יחיד, ומאפשרת להריץ סימולציות ומודלי AI בקנה מידה חסר תקדים.
לצד NVIDIA, תרמו לפרויקט גם חברות אירופיות מובילות. Eviden, חטיבת הסופר־מחשוב של קבוצת Atos הצרפתית, ו-ParTec הגרמנית, לקחו חלק מרכזי בהקמה ובניהול המערכת. הן פיתחו יחד את שכבת הניהול ParaStation Modulo ואת פתרונות ה-xScale, המשולבים עם רכיבי תוכנה ייחודיים של מרכז הסופר־מחשוב ביוליך. שיתוף הפעולה הזה מדגיש את השאיפה האירופית לעצמאות טכנולוגית בתחום רגיש ואסטרטגי, שבו עד כה נשלטה הבמה בעיקר בידי ארצות הברית ואסיה.
הפרויקט כולו נתמך על ידי יוזמת EuroHPC JU, שמאגדת מימון של האיחוד האירופי, מדינות חברות ושותפים תעשייתיים במסגרת תקציב של מיליארדי אירו. היוזמה נועדה להבטיח שיבשת אירופה לא תישאר מאחור במרוץ העולמי אחר עוצמת חישוב. השקת JUPITER אינה רק אירוע סמלי אלא מהלך אסטרטגי שמציב את אירופה בעמדה חדשה במאבק על ההובלה המדעית והטכנולוגית. המערכת צפויה להאיץ את קצב המחקר בתחומים כמו אקלים, בריאות, אנרגיה ובינה מלאכותית.
בתמונה למעלה: פלטפורמת ההאצה Spectrum-X של חברת אנבידיה
מאת יוחאי שויגר
חטיבת הקישוריות (Networking) של אנבידיה, שפעילותה מרוכזת בישראל, ממשיכה להציג קצב צמיחה מהיר אף יותר מזה של החברה כולה. ברבעון השני רשמה החטיבה הכנסות שיא של 7.3 מיליארד דולר – זינוק של 98% בהשוואה לשנה שעברה ו-46% לעומת הרבעון הקודם. הצמיחה נבעה מביקוש חזק למוצרי Spectrum-X Ethernet, InfiniBand ו-NVLink, שהם רכיבי קישוריות קריטיים עבור מרכזי נתונים ומחברים בין המעבדים בשרת ובין השרתים השונים.
כך עולה מהדו"ח הרבעוני של חברת אניבידה העולמית. מהדו"ח מתברר שמוצרי Spectrum-X לבדם כבר מייצרים הכנסות שנתיות בהיקף של יותר מ-10 מיליארד דולר, והם הראו קצב צמיחה דו-ספרתי ברבעון האחרון. גם משפחת המוצרים הנוספת של החטיבה רשמה ביצועים יוצאי דופן: ההכנסות מ-InfiniBand כמעט והוכפלו בתוך רבעון, הודות לאימוץ הדור החדש XDR, המספק רוחב פס כפול מהגרסה הקודמת. היכולת הזו חיונית במיוחד להרצת המודלים הגדולים של יישומי בינה מלאכותית.
במקביל, גם הביקוש לטכנולוגיית NVLink, המספקת קישוריות בין רכיבים בתוך השרת – ממשיך לצמחו במהירות. בין השאר בזכות הגידול במכירות שרתים של אנבידיה, דוגמת GB200 ו-GB300. בשיחת הוועידה שלאחר פרסום הדו"ח, נמסר ש“הדרישות ההולכות וגדלות של אשכולות חישוב ל-AI מחייבות רשתות יעילות במיוחד ובעלות השהייה נמוכה”. זהו מסר המחדד את חשיבותה של החטיבה הישראלית לצמיחת החברה כולה. בסך הכל, מכירות החברה ברבעון השני צמחו בכ-56% בהשוואה לרבעון המקביל אשתקד, והסתכמו בשיא של 46.7 מיליארד דולר.
הצהרות לחוד, וביורוקרטיה לחוד
למרות שאנבידיה קיבלה בחודש יולי רישיונות למכירת שבבי H20 לחלק מלקוחותיה בסין, היא עדכנה אתמול בשיחת הוועידה כי בפועל לא בוצעו כל מכירות ללקוחות הללו. הסיבה לכך נעוצה במצב רגולטורי לא ברור: הממשל האמריקאי הביע ציפייה לקבל 15% מההכנסות ממכירות אלו, אך טרם פרסם תקנה רשמית שמסדירה זאת, מה שהותיר את אנבידיה ללא יכולת ממשית לנצל את הרישיונות שכבר הוענקו.
במקביל, אנבידיה פועלת לפתח גרסת Blackwell ייעודית לשוק הסיני. "המוצרים שלנו מתוכננים ונמכרים לשימוש מסחרי מועיל, וכל מכירה ברישיון תתמוך בכלכלה האמריקאית ובהובלתה הטכנולוגית”, נאמר בשיחת הוועידה. לאור חוסר הוודאות הרגולטורית, באנבידיה לא הכלילו בתחזית לרבעון הבא את ההכנסות הצפויות ממכירות H20 לסין. במידה והעניין יוסדר, בחברה מעריכים כי מכירות H20 יסתכמו ברבעון השלישי ב-2-5 מיליארד דולר.
הדור הבא כבר בייצור
אנבידיה עדכנה שפלטפורמת Rubin, הדור הבא של מערכות ה-AI שלה, כבר נכנסה לייצור במפעלי השבבים. זו הפעם הראשונה שהיא מציעה פלטפורמה מלאה הכוללת גם CPU מתוצרתה (Vera), במקום להסתמך על מעבדים של אינטל ו-AMD כפי שהיה בעבר. לצד Vera יכלול המערך את כרטיסי ה-Rubin GPU, והם יחד יהוו את ליבת החישוב של המערכת.
הפלטפורמה תכלול גם רכיבי קישוריות חדשים שפותחו בישראל: כרטיס הרשת המתקדם CX9 SuperNIC, מתג NVLink חדש בעל קיבולת משופרת, מתגי Spectrum-X מחוזקים, ומעבד סיליקון-פוטוניקס המאפשר תקשורת אופטית מהירה במיוחד בין שרתים ושבבים. פלטפורמת Rubin תיכנס לייצור המוני במהלך 2026. בכך שומרת אנבידיה על קצב פיתוח שנתי של פלטפורמות חדשות, ומשדרת ללקוחות כי היא ממשיכה לחדש לא רק ברמת ה-GPU, אלא גם בתחומי המחשוב, הקישוריות והתוכנה.
ביקוש מדינתי גובר
תחום צומח חדש קיבל את הכינוי "AI ריבוני". מדובר בפרוייקטים לאומיים שבמסגרתם מדינות בונות תשתיות בינה מלאכותית עצמאיות על בסיס כוח מחשוב, נתונים וכוח אדם מקומיים. היא מעריכה שמכירותיה בתחום הזה ידיעו השנה להיקף של יותר מ-20 מיליארד דולר – יותר מאשר הכפלה בהשוואה לשנת 2024.
מדובר ביוזמות רחבות היקף, שבהן אנבידיה ניצבת בחזית: באירופה הודיעה הנציבות על השקעה של 20 מיליארד אירו בהקמת 20 “מפעלי AI” בצרפת, גרמניה, איטליה וספרד – מתוכם חמישה "ג’יגה-מפעלים" שצפויים להגדיל פי עשרה את קיבולת המחשוב ביבשת. בבריטניה נחשף לאחרונה מחשב-העל Isambard-AI, המופעל על ידי טכנולוגיות של אנבידיה, המספק 21 אקזה-פלופס של ביצועים ומיועד להאיץ מחקר בתחומים כמו גילוי תרופות ומודלים אקלימיים.
ארצות הברית נוקטת בצעד חסר תקדים במאבקה בהברחות שבבי בינה מלאכותית מתקדמים לשוק הסיני. לפי דיווח בלעדי היום ברויטרס, רשויות האכיפה האמריקאיות מטמיעות רכיבי מעקב פיזיים בשרתים מתוצרת דל (Dell) וסופר-מיקרו (Supermicro) הכוללים שבבים של אנבידיה ו-AMD, כדי לאתר ניסיונות להסיטם מהיעד החוקי ולהבריחם לסין.
ההתקנים מותקנים באופן סמוי בתוך האריזות או המכשירים עצמם, ומאפשרים מעקב בזמן אמת גם לאחר שהציוד יצא מהמפעל. המבצע, שהחל בשימוש נקודתי כבר ב-2024 והפך למערכתי ב-2025, מנוהל בשיתוף המחלקה לביטחון המולדת, ה-FBI ורשות המכס, ומהווה חלק מהידוק הפיקוח על ייצוא טכנולוגיות רגישות.
הצעד נועד להתמודד עם תופעה רחבה של הברחות שבבים מתקדמים, המבוצעות באמצעות רשתות מורכבות של חברות צד שלישי, מתווכים וכנופיות פשע מאורגנות. ההברחות כוללות לעיתים רכישות חוקיות לכאורה בשווקים חופשיים, שממשיכות במסלולים עקיפים דרך מדינות באסיה, אירופה והמזרח התיכון, עד להגעת הציוד לסין. חלק מהגורמים המעורבים משתמשים בזהויות בדויות, בזיוף מסמכי ייבוא ובשינוי ייעוד הסחורה כדי להסוות את יעדה האמיתי. לפי ההערכות, חלק מהשבבים המוברחים מגיעים לשימושים צבאיים ולפרויקטים ביטחוניים בסין, מה שמחזק את מאמצי האכיפה האמריקאיים.
המהלך מגיע במקביל למתיחות בין ארצות הברית לסין סביב טכנולוגיות בינה מלאכותית. לאחרונה חזרה אנבידיה לשווק גרסה מותאמת של שבב H20 לשוק הסיני לאחר שקיבלה רישיון ייצוא, אך ההסכמה לוותה בהגבלות ובדרישות כספיות מצד וושינגטון, לפיהן אנבידיה ו-AMD יפרישו לרשויות בארצות הברית 15% מהכנסותיהן ממכירות שבבים מתקדמים לסין. מנגד, בייג’ינג הזהירה כי השבב עלול להכיל “דלת אחורית” המאפשרת שליטה מרחוק, ודרשה הוכחות לבטיחותו. אנבידיה דחתה את הטענות והבהירה כי הכנסת מנגנוני מעקב או שליטה חיצוניים תפגע קשות באמון הגלובלי ותסכן תשתיות קריטיות.
חברת אנבידיה (Nvidia) הכריזה על שני מודלי הסקה חדשים ייעודיים לסוכני AI. שני המודלים, Nano 2 ו-Llama Nemotron Super 1.5, הם חלק ממשפחת מודלי ההסקה Nemotron של אנבידיה, והם פותחו בין היתר במרכז הפיתוח של אנבידיה בישראל. זו הפעם הראשונה שאנבידיה חושפת פעילות מו"פ בישראל בתחום מודלי AI.
המודלים נבנו במיוחד להפעלת סוכני AI, מערכות אוטונומיות המבצעות משימות מורכבות ורב־שלביות, והם שונים ממודלי ההסקה המוכרים מעולם הצ’אטבוטים. בעוד שמודלי הסקה לשיחה מתמקדים בניהול דיאלוג טבעי, מודלי ההסקה החדשים מותאמים לביצוע מהיר, חסכוני ומדויק של רצפים ארוכים של פעולות – מתכנון והחלטה, דרך הפעלת כלים חיצוניים ועד בדיקת תוצאות – כפי שנדרש בסוכני AI.
Nemotron Nano 2 מציע גרסה קומפקטית להרצה על התקני קצה כמו רובוטים או מצלמות חכמות, ואילו Llama Nemotron Super 1.5, המבוסס על שדרוג של מודל LLaMA של מטא, מיועד למשימות חישוביות כבדות בסביבות עתירות נתונים.
היעילות של המודלים מאפשרת לארגונים לשלב סוכני AI בקנה מידה רחב מבלי להכביד על עלויות המחשוב. בין המשתמשים בטכנולוגיה כבר כיום ניתן למנות את CrowdStrike, Uber, Zoom, EY ואמדוקס הישראלית, בפרויקטים של אוטומציה, שירות לקוחות, לוגיסטיקה וניטור איומים בזמן אמת.
לצד Nemotron, הציגה אנבידיה את Cosmos Reason – מודל ויזואלי-שפתי (VLM) בעל יכולות הסקה פיזיקליות. המודל נועד לאפשר למכונות להבין את העולם הפיזי באופן הדומה לתפיסה אנושית: לזהות חפצים, להבין את מיקומם היחסי, להעריך מרחקים, לזהות תנועה, ולפרש אינטראקציות בין עצמים. הוא משלב בין ניתוח תמונה ווידאו לבין הבנת שפה, כך שניתן "לשאול" אותו על סצנה ולקבל ניתוח מדויק, או להורות לו לבצע פעולה בהתאם למתרחש בזמן אמת.
השילוב בין Nemotron ל-Cosmos Reason מעניק לסוכן AI יכולת פעולה מלאה בעולם האמיתי: Nemotron מספק את "המוח", כלומר תכנון, חישוב, לוגיקה וקבלת החלטות, בעוד Cosmos Reason מספק את "החושים" – ראייה, הבנה מרחבית והסקה פיזיקלית. יחד הם מאפשרים לסוכן לא רק לחשוב אלא גם לראות, להבין ולפעול, לדוגמה ברובוט תעשייתי שיכול לזהות תקלה, לתכנן את דרך התיקון, ולהוציא אותה לפועל באופן אוטונומי לחלוטין.
חברת ברודקום (Broadcom) הכריזה אתמול (ב') על השקה מסחרית של Jericho-4 – שבב תקשורת חדש המיועד לתמוך בתעבורת נתונים בקנה מידה עצום. מדובר בשבב הדגל החדש בסדרת Jericho של ברודקום, אשר תוכנן לאפשר קישוריות בין מרכזי נתונים מרוחקים, כחלק ממערכות AI מבוזרות המשלבות עד מיליון יחידות עיבוד (XPU). בעקבות ההכרזה, עלתה אתמול מניית החברה ביותר מ-3% לשווי שוק של 1.4 טריליון דולר.
Jericho-4 מציע קצב העברה של 51.2 טרה-ביט לשנייה (Tbps) ומעבד עד 77 מיליארד חבילות מידע בשנייה – שיפור משמעותי ביחס לדור הקודם, Jericho-3, שתמך בקצב מקסימלי של 28.8 Tbps. מלבד קצב ההעברה, הדור החדש כולל גם שילוב של זיכרון HBM ישירות על השבב, המשמש כ"חיץ" פנימי שמאפשר ספיגת עומסים פתאומיים מבלי לאבד מידע או להוריד ביצועים – תכונה קריטית במערכות AI עתירות תעבורה. כחלק מהתכנון, השבב תומך גם בתעבורה מוצפנת (MACsec) בקצב מלא וללא פגיעה בביצועים, וכן מאפשר שימוש ב-HyperPort – פורמט חדש המאגד ארבעה חיבורי 800GbE לקישור אחד של 3.2 Tbps, לצמצום מורכבות התקשורת והריווח במרכזי נתונים. Jericho-4 בנוי על טכנולוגיית ייצור 3 ננומטר של TSMC – מהלך שמבטיח יעילות אנרגטית ושיפור משמעותי בצפיפות הארכיטקטונית.
אסטרטגיית "שלושת השבבים"
ההכרזה על Jericho-4 משלימה את אסטרטגיית שלושת השבבים של ברודקום, המציעה כיסוי לכל שלוש שכבות הקישוריות במרכזי נתונים מודרניים: Tomahawk Ultra לטווח קצר (בתוך שרתים וארונות), Tomahawk-6 לקישוריות בתוך הדאטה סנטר, ו-Jericho-4 לטווחים גיאוגרפיים בין מרכזי נתונים. כל שלושת השבבים פועלים בפרוטוקול Ethernet פתוח, ומבוססים על עקרונות יוזמת OpenTIME – יוזמה שמקדמת שקיפות וסטנדרטיזציה בתחום הרשתות למערכות AI. האסטרטגיה של ברודקום מספקת מענה מקצה לקצה – בניגוד לאנבידיה, שמציעה פתרונות תקשורת חזקים אך מוגבלים יותר בהיקף הפריסה. בעוד אנבידיה מתמקדת במערכות NVLink ו-NVSwitch, המיועדות בעיקר לחיבור בין GPU-ים בתוך מערכות DGX ובין שרתים סמוכים, ברודקום מציעה חלופה פתוחה וגמישה, הפועלת גם בקנה מידה עולמי, בין אתרים מרוחקים.
השילוב בין רוחב פס גבוה, יכולת הצפנה מתקדמת, קנה מידה אקסה-סקיילי והאחידות של Ethernet – הופך את Jericho-4 לאחד הרכיבים הקריטיים בפאזל התשתיות לעולם ה-AI. הוא צפוי להשתלב במערכות של ענקיות מחשוב ענן, ספקיות GPU, וחברות הבונות דאטה סנטרים חדשים עם קיבולת חישוב של מאות אלפי יחידות עיבוד מואצות. —
בתמונה למעלה: הצוות של Vast Data. מקור: אתר Vast Data
סוכנות הידיעות רויטרס דיווחה בסוף השבוע (ו') כי ענקית השבבים אנבידיה וקרן ההשקעות של גוגל, CapitalG, נמצאות במשא ומתן מתקדם להשקעה בחברת תשתיות הבינה המלאכותית Vast Data, לפי שווי של עד 30 מיליארד דולר. אם העסקה תצא לפועל, מדובר בזינוק דרמטי מהשווי האחרון של החברה, אשר עמד על 9.1 מיליארד דולר בלבד לפני כשנתיים.
לפי הדיווח, Vast Data כבר רושמת תזרים מזומנים חיובי, ומציגה צמיחה מרשימה – עם הכנסות שנתיות חוזרות (ARR) של כ-200 מיליון דולר בשנה בינואר 2025, וצפי להכנסות של כ־600 מיליון דולר בשנת 2026. העסקה הנבחנת כוללת השקעה הונית משמעותית, לצד שותפות אסטרטגית.
חברת Vast Data נוסדה ב-2016 על-ידי רנן הלק ושחר פינבליט, יזמים ישראלים שצמחו מתוך תחום האחסון והחומרה. אף שמטה החברה ממוקם כיום בניו יורק, הליבה ההנדסית שלה נמצאת בישראל, ובחברה עובדים מאות מהנדסים מקומיים. היא נחשבת היום לאחת מהחברות הישראליות הפרטיות בעלות השווי הגבוה ביותר בעולם.
ביטול צוואר הבקבוק
הטכנולוגיה של Vast מתמודדת עם אחד האתגרים הגדולים של עידן ה-AI: אחסון וניהול נתונים עצומים במהירות גבוהה מאוד, בסביבות המערבות עשרות ואף מאות אלפי מעבדי GPU. הפתרון שהיא מציעה: תשתית אחודה של אחסון, מסד נתונים ויכולת חישוב, המאפשרת למערכות AI לגשת אל מידע בקצבים של טרה-בייט לשנייה, ללא צווארי בקבוק.
הארכיטקטורה של החברה, DASE (Disaggregated and Shared Everything), מתוכננת במיוחד לתמוך בתשתיות מבוזרות – ובכך משתלבת היטב עם סביבות רשת מהירות כמו אלו שיצרה מלאנוקס (Mellanox) הישראלית, שנרכשה על-ידי אנבידיה בשנת 2019, וממשיכה להיות חלק מרכזי בפורטפוליו החומרה והצלחה העסקית של אנבידיה.
Vast Data כבר משתפת פעולה עם CoreWeave, אחת מחברות הענן המתמחות ב-AI שצומחות במהירות עצומה, ואשר גם היא נתמכת על ידי אנבידיה. CoreWeave עושה שימוש בתשתיות האחסון של Vast לצורך הרצת מודלים בקנה מידה עצום. בכך, Vast הופכת לחוליה חיונית באקוסיסטם החדש של מחשוב מבוזר, המוביל על-ידי גופים כמו OpenAI, xAI ואנבידיה עצמה. במובן הזה, Vast Data משלימה את החזון של אנבידיה: לא רק כוח חישוב (GPU), אלא גם שכבת גישה מהירה לנתונים – בדיוק מה שנדרש כדי להאיץ אימון מודלים גדולים והפעלת מערכות AI בזמן אמת.
הפלטפורמה המרכזית של החברה, VAST Data Platform, מאגדת תחת ממשק אחד שלוש שכבות תפעול נפרדות: אחסון, גישה לנתונים ומסד נתונים. אחד מהרכיבים המרכזיים במערכת נקרא VAST DataSpace. הוא מאפשר ליצור "מרחב נתונים אחוד", כלומר, אפליקציות ומערכות AI יכולות לגשת לקבצים, אובייקטים ומידע לא־מובנה מכל מקום, בלי לדעת איפה הוא באמת מאוחסן. רכיב נוסף, VAST DataBase, נותן מענה לצרכים של עיבוד ושאילתות, כך שאין צורך להוציא את המידע החוצה אל בסיסי נתונים חיצוניים.
מערכת מוכוונת AI ו-GPU
המערכת נבנתה במיוחד לעולם של AI ו-GPU, ומותאמת לעבודה עם סביבות כמו DGX של אנבידיה, CoreWeave, או שירותי ענן ייעודיים ל-LLM. הפלטפורמה של Vast מציגה ביצועים גבוהים במיוחד, שמאפשרים להזרים נתונים למודלי AI בקצבים של עשרות ומאות ג׳יגה-בייט לשנייה, תוך שהיא שומרת על זמינות של "שישה תשיעיות" (99.9999%). במקביל, היא יודעת לנהל פטה-בייטים של נתונים בצורה Vמאפשרת גישה מהירה גם לאחסון קבצים רגיל, גם לאובייקטים, וגם למידע שמוזן למודלים גדולים בזמן אמת. הממשק תומך בפרוטוקולים כמו NFS, S3 ו־RDMA, כלומר היא יכולה להשתלב כמעט בכל סביבה – מארגון מסורתי ועד מרכזי נתונים גדולים המפעילים מערכות כמו GPT או מודלי ראייה. השעלוב בין ביצועים, גמישות וארכיטקטורה חכמה הפך את Vast לפלטפורמה חשובה בשוק תשתיות ה-AI.
חברת האנרגיה הנורבגית Aker ASA הודיעה על הקמת מרכז נתונים תעשייתי חדש לצורכי בינה מלאכותית, בשיתוף עם חברת Nscale Global Holdings ו-OpenAI. המיזם, שיוקם בצפון נורבגיה תחת השם Stargate Norway, יהפוך עד סוף 2026 לאחד ממתקני המחשוב הגדולים באירופה. לפי ההודעה, המתקן יופעל כולו באמצעות אנרגיה הידרואלקטרית מתחדשת, ויכיל כ-100,000 מעבדים של Nvidia. ההשקעה בשלב הראשון נאמדת בכמיליארד דולר, אולם התכונית כוללת אופציה להכפלת ההשקעה עד פי עשרה. השותפות בין Aker ל-Nscale תתבסס על חלוקה שווה, כאשר OpenAI תהיה בתחיל משתמש מרכזי, ובשלב מאוחר יותר ייתכן שתצטרף גם כבעלת מניות.
המתקן יפעל בהספק של 230 מגה-וואט, עם תכנון להרחבה נוספת של 290 מגה-וואט. הוא יתבסס על טכנולוגיות קישוריות מהדור החדש כמו NVLink ורכיבי GB300 Superchips ASA. הקמת המתקן היא מהלך אסטרטגי שעשוי לסמן נקודת מפנה עבור אירופה, שבמשך שנים נותרה מאחור ביחס לארצות הברית וסין בכל הנוגע לתשתיות מחשוב בקנה מידה תעשייתי. בעוד שבארה"ב מוקמים מרכזי עיבוד עצומים על ידי ענקיות כמו מיקרוסופט וגוגל, מדינות אירופה התמודדו עם חסמים של עלויות אנרגיה גבוהות, רגולציה מחמירה ופיצול פוליטי.
תאגיד Aker הנורבגי פועל בתחומי התעשייה, האנרגיה והטכנולוגיה, ומשקיע בשנים האחרונות בתחום התשתיות הדיגיטליות. Nscale Global Holdings היא חברה אמריקאית המתמחה בפיתוח והקמת מרכזי נתונים עתירי ביצועים (HPC), בדגש על יישומי בינה מלאכותית בקנה מידה גדול. אף שנורבגיה איננה חברה מן המניין באיחוד האירופי, היא מציעה מענה לחסמים אלו באמצעות אנרגיה מתחדשת זולה, אקלים קר שמתאים לקירור טבעי, ותמיכה ממשלתית במיזמים טכנולוגיים. המהלך משתלב בשאיפה של האיחוד האירופי להשיג "ריבונות דיגיטלית". כלומר, להקים תשתיות AI עצמאיות בתוך אירופה, לצמצם את התלות בשירותים חיצוניים והבטחת נגישות ליכולות חישוב מתקדמות עבור מוסדות מחקר, חברות מקומיות וממשלות. Stargate Norway עשוי להיות הראשון בסדרה של מתקנים דומים, שיחזקו את מעמד היבשת בתחרות העולמית על השליטה בטכנולוגיות בינה מלאכותית.
אנו עושים שימוש בקבצי עוגיות לצרכים שיווקיים ושיפור חוויית השימוש באתר. איסוף המידע באתר נעשה באופן אנונימי, למעט בטפסי יצירת קשר והרשמה לניוזלטר בהם אתם מתבקשים למלא פרטים אישיים. אנו עושים שימוש במגוון תוכנות לאיסוף וניתוח אנליטי של הנתונים באופן אנונימי לרבות: גוגל אנליטיקס, פייסבוק פיקסל ועוד.
What personal data we collect and why we collect it
We collect anonymous data on visitors in this website for business purposes such as enhancing user experience, digital marketing and search engine optimization.
We collect personal data such as email address and names on various forms – all forms present in this website include consent checkboxes and clear reason for collecting the data: general inquiries on our products, newsletter subscription, professional inquiries job applications. All forms are designed in accordance with GDPR requirements.
Comments
When visitors leave comments on the site we collect the data shown in the comments form, and also the visitor’s IP address and browser user agent string to help spam detection.
An anonymized string created from your email address (also called a hash) may be provided to the Gravatar service to see if you are using it. The Gravatar service privacy policy is available here: https://automattic.com/privacy/. After approval of your comment, your profile picture is visible to the public in the context of your comment.
Media
If you upload images to the website, you should avoid uploading images with embedded location data (EXIF GPS) included. Visitors to the website can download and extract any location data from images on the website.
Contact forms and newsletter
We use Gravity Forms as our platform of choice for all forms present in this website. Forms present in this website have been modified to fit GDPR requirements.
Unless specifically specified and approved by visitor, we do not use the collected data for marketing purposes.
We use Mailchimp to collect email addresses and send periodical marketing materials to our customers.
Handling and management of all email addresses and mailing operations is conducted under GDPR terms and guidelines provided by Mailchimp.
All subscribers are able to change their subscriptions preferences or unsubscribe at any given time.
Techtime has accepted the Data Processing Addendum agreement provided by Mailchimp for all its Mailchimp accounts.
All our lead collection forms have been altered in accordance with GDPR requirements and now include unchecked checkboxes in order to accept the explicit consent of the user prior to form submission.
Cookies
If you leave a comment on our site you may opt-in to saving your name, email address and website in cookies. These are for your convenience so that you do not have to fill in your details again when you leave another comment. These cookies will last for one year.
If you have an account and you log in to this site, we will set a temporary cookie to determine if your browser accepts cookies. This cookie contains no personal data and is discarded when you close your browser.
When you log in, we will also set up several cookies to save your login information and your screen display choices. Login cookies last for two days, and screen options cookies last for a year. If you select “Remember Me”, your login will persist for two weeks. If you log out of your account, the login cookies will be removed.
If you edit or publish an article, an additional cookie will be saved in your browser. This cookie includes no personal data and simply indicates the post ID of the article you just edited. It expires after 1 day.
Embedded content from other websites
Articles on this site may include embedded content (e.g. videos, images, articles, etc.). Embedded content from other websites behaves in the exact same way as if the visitor has visited the other website.
These websites may collect data about you, use cookies, embed additional third-party tracking, and monitor your interaction with that embedded content, including tracing your interaction with the embedded content if you have an account and are logged in to that website.
Analytics
We use Google Analytics regularly for monitoring user behavior and traffic sources and utilize the gathered information for enhancing user experience and for business purposes.
The use of Google Analytics in done according to GDPR terms and guidelines provided by Google.
Legal Entity: Techtime.
Primary Contact (a.k.a. “Notification Email Address”): [email protected] – this email is designated for receiving notices under the Google Ads Data Processing Terms.
Who we share your data with
We use various cloud platforms and third party providers for the purpose of operating this website.
We do not share or sell your data for any commercial purpose other than specified above.
We use the following processors for the operating this website and executing related digital marketing campaigns:
WP Engine – Hosting Provider
Cloudflare – Cloud based security and web performance processor.
Google Cloud Platform – data centers provider for WP Engine
Sucuri – Website security provider
Mailchimp – Newsletter service provider
Google Analytics, Adwords, Webmasters
Facebook – We use Facebook for advertising and place tracking code on our website for enhancing digital marketing campaigns (i.e – Facebook Pixel).
Planwize Ltd – Digital Marketing Agency.
How long we retain your data
If you leave a comment, the comment and its metadata are retained indefinitely. This is so we can recognize and approve any follow-up comments automatically instead of holding them in a moderation queue.
For users that register on our website (if any), we also store the personal information they provide in their user profile. All users can see, edit, or delete their personal information at any time (except they cannot change their username). Website administrators can also see and edit that information.
What rights you have over your data
If you have an account on this site, or have left comments, you can request to receive an exported file of the personal data we hold about you, including any data you have provided to us. You can also request that we anonymize or erase any personal data we hold about you. This does not include any data we are obliged to keep for administrative, legal, or security purposes.
Request for Receiving Data Associated with One’s Email Address
Users may request to receive access to all related information submitted to this website for their review.
In accordance with GDPR compliance, user may further request the anonymization of such data.
In order to request access for all data associated with a given email address, users may submit the request here. Users then receive an email with a link to a page with all related information.
The link is valid for 24 hours. Users may submit additional request for the same email address once in every 24 hours.
A request for anonymization should be sent separately: User may select the data he or she wishes the site owner to anonymize so it cannot be linked to his or her email address any longer. An email confirmation will be sent once linked data has been successfully anonymized.
Where we send your data
Visitor comments may be checked through an automated spam detection service. All our processors and third party providers comply with GDPR requirements and apply privacy by design and necessary measure to ensure that personal data is being processed and handled in accordance with requirements. The list of our third party service providers and processors is listed above.
Contact information
For all privacy-specific concerns inquiries, you may contact us at [email protected]
How we protect your data
We use rigorous practices in order to protect our website and data collected, as well as world class cloud and hosting providers.
Communication between visitor and the server is encrypted using SSL.
The site is protected with web application firewall and is undergoing daily security scans, regular software updates by a dedicated team in order to minimize the risk of data breach.
What data breach procedures we have in place
Once a data breach is detected, our providers execute a dedicated standard operational procedure in order to assess the scope and potential damage, provide immediate remedy, patch any potential security holes and notify users who may be affected by the breach.
We may contact affected users with one or more form of communication within 72 hours and provide the needed information as to the scope of the data breach and actions taken.
What third parties we receive data from
We do not receive data from third parties for our marketing campaigns.
What automated decision making and/or profiling we do with user data
We may apply remarketing/retargeting methods while conducting online advertising using Google Facebook and the likes.
The above is conducted by applying various tracking codes into our website in order to track and retarget users based on
By visiting and using this website you are hereby provide your consent for the use of the above means and methods.